Horizontal parking control method and control system
A parking control and parking technology, which is applied to vehicle components, steering mechanisms, transportation and packaging, etc., can solve the problems of unfavorable embedded system parking trajectory real-time online calculation, complex function forms, and high requirements for ECU calibration space capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
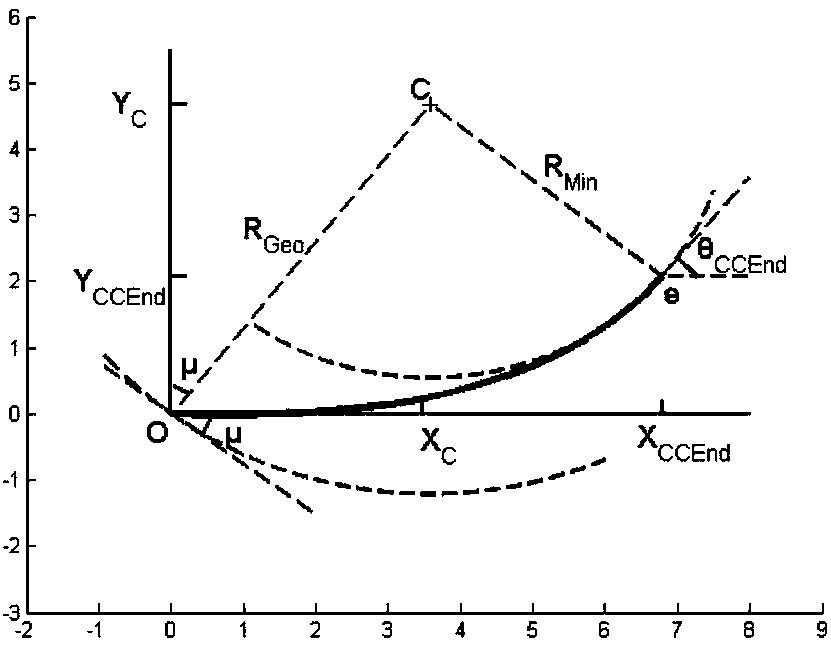
[0073] The present invention will be further described below with horizontal parking embodiment, image 3 Schematic diagram for this example. Although this example only shows the implementation method when the initial heading angle of the vehicle body is zero, that is, the implementation method when the vehicle body is parallel to the X-axis of the parking space coordinate system when parking, the present invention is also applicable to the case where the initial heading angle of the vehicle body is not zero.
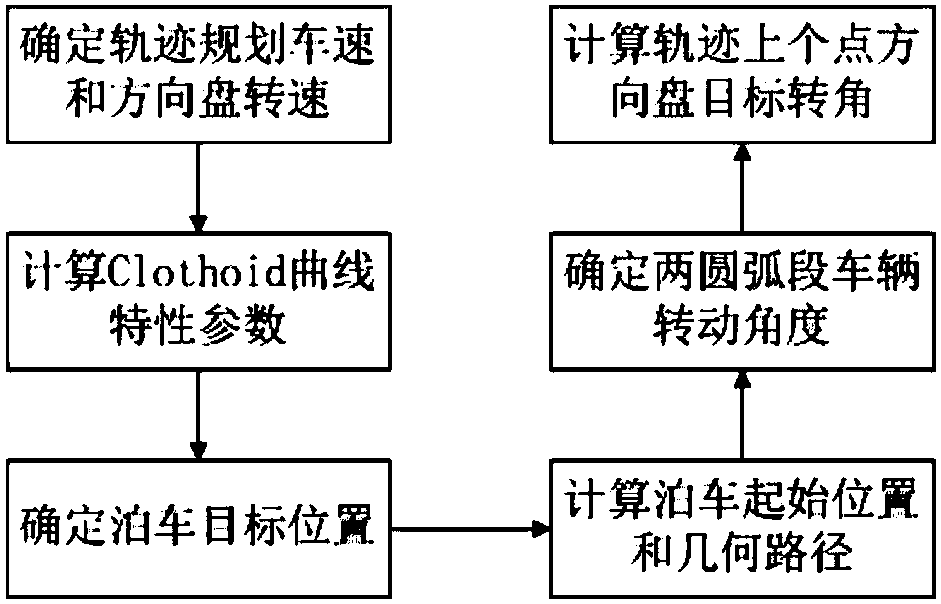
[0074] According to the requirements of the minimum length and width of a parking space, the parking speed V and the steering wheel rotation speed ω are determined, and the values of the two must be lower than the highest allowable parking speed and steering wheel rotation speed respectively.
[0075] According to the selected V and ω, the trajectory characteristic parameter of the clothoid curve (Clothoid curve) is calculated by the following formula;
[0076]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More