Online calibration method of magnetic sensor for unmanned aerial vehicle
A magnetic sensor and calibration method technology, applied in the direction of instruments, measuring devices, ground navigation, etc., can solve the problems of cumbersome calibration process, long calibration time, limited calibration accuracy, etc., reduce operation and maintenance costs, and achieve high-precision calibration Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] A method for online calibration of magnetic sensors for unmanned aerial vehicles provided by the present invention specifically includes the following steps:
[0037] Step 1. Rotate the body horizontally, and repeatedly acquire the pitch angle θ and roll angle γ detected by the inertial navigation system, and the three-axis output M of the magnetic sensor in the body coordinate system during the rotation process. x , M y , M z ;
[0038] Step 2. Calculate the original magnetic field strength vectors in multiple groups of horizontal planes according to the parameters obtained in the step 1
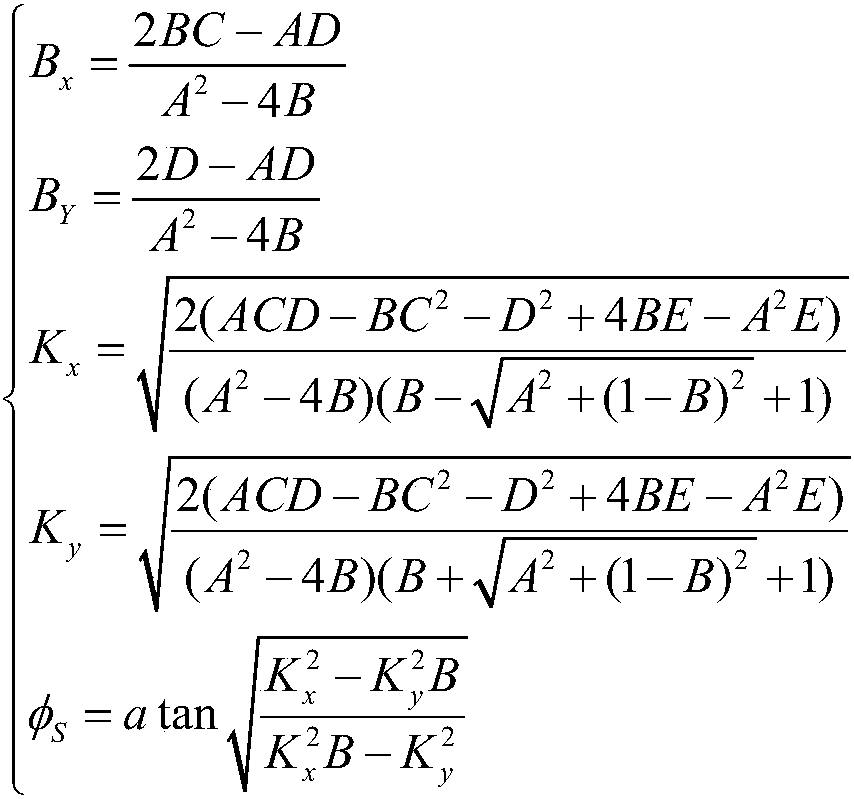
[0039] Step 3. Establishing an elliptical trajectory model of the rotation of the original magnetic field intensity vector in the horizontal plane, and fitting the magnetic calibration parameters based on the least square method;
[0040] Step 4. After the body rotates horizontally for one week, based on the multiple sets of magnetic field strength vectors H obtained in step 2, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More