

Track detection method and robot
A track detection and robot technology, applied in the field of robots, can solve problems such as wrong detection, missing detection personnel, safety hazards, etc., and achieve the effect of automatic detection and safe operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
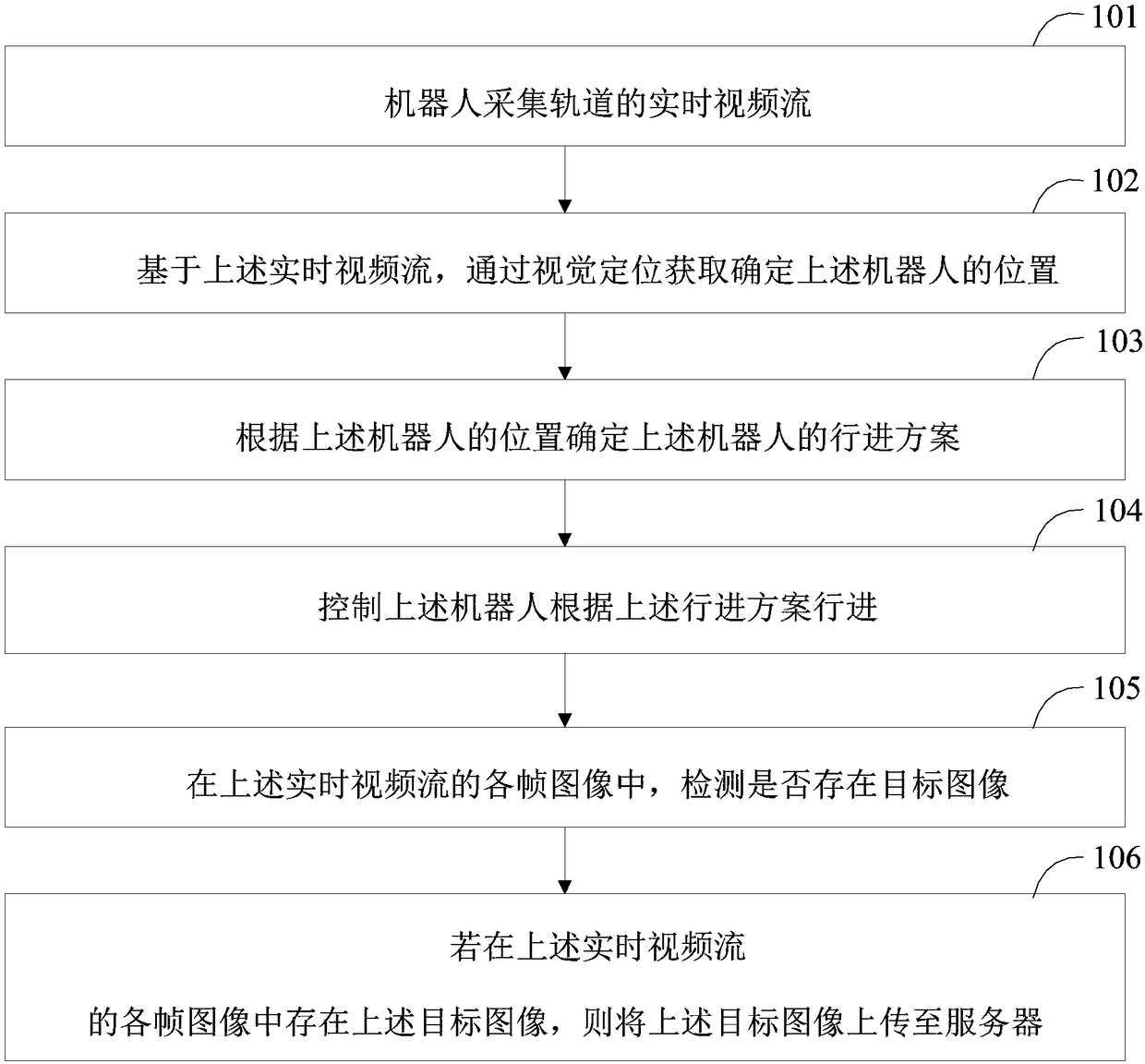
[0031] figure 1 The implementation flow of the track detection method provided by Embodiment 1 of the present invention is shown, and the details are as follows:
[0032] In step 101, the robot collects the real-time video stream of the track;
[0033] In the embodiment of the present invention, when the maintenance personnel start the robot applied in the field of rail transit, they first place the robot on the track position, for example, install the rail robot on the rail of the track, or release the flying robot near the track . After the above-mentioned robot is started, it first sets the frame rate of the image acquisition device (such as a camera) according to the sampling theorem, and then starts to collect the real-time video stream of the track. Specifically, the above-mentioned robot is equipped with multiple cameras, and based on different positions of the cameras installed on the robot, track images from different angles can be collected; based on the type of ca...
Embodiment 2
[0100] Figure 6 A specific structural block diagram of the robot provided by Embodiment 2 of the present invention is shown, and for convenience of description, only parts related to the embodiment of the present invention are shown. The robot 6 includes: an image acquisition module 61 , a visual positioning module 62 , a solution determination module 63 , a travel control module 64 , a fault detection module 65 , and an information upload module 66 .
[0101] Wherein, the video acquisition module 61 is used for the real-time video stream of the machine acquisition track;
[0102] The visual positioning module 62 is used to determine the position of the above-mentioned robot through visual positioning based on the above-mentioned real-time video stream;
[0103] A plan determination module 63, configured to determine the travel plan of the above-mentioned robot according to the position of the above-mentioned robot;
[0104] A travel control module 64, configured to control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More