High-voltage DC transmission line magnetic robot levitation force control system and control method
A high-voltage transmission line, high-voltage direct current technology, applied in the direction of magnetic attraction or thrust holding devices, electrical components, overhead lines/cable equipment, etc., can solve friction and slippage, heavy body, reduce the working efficiency of line inspection robots, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present disclosure will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
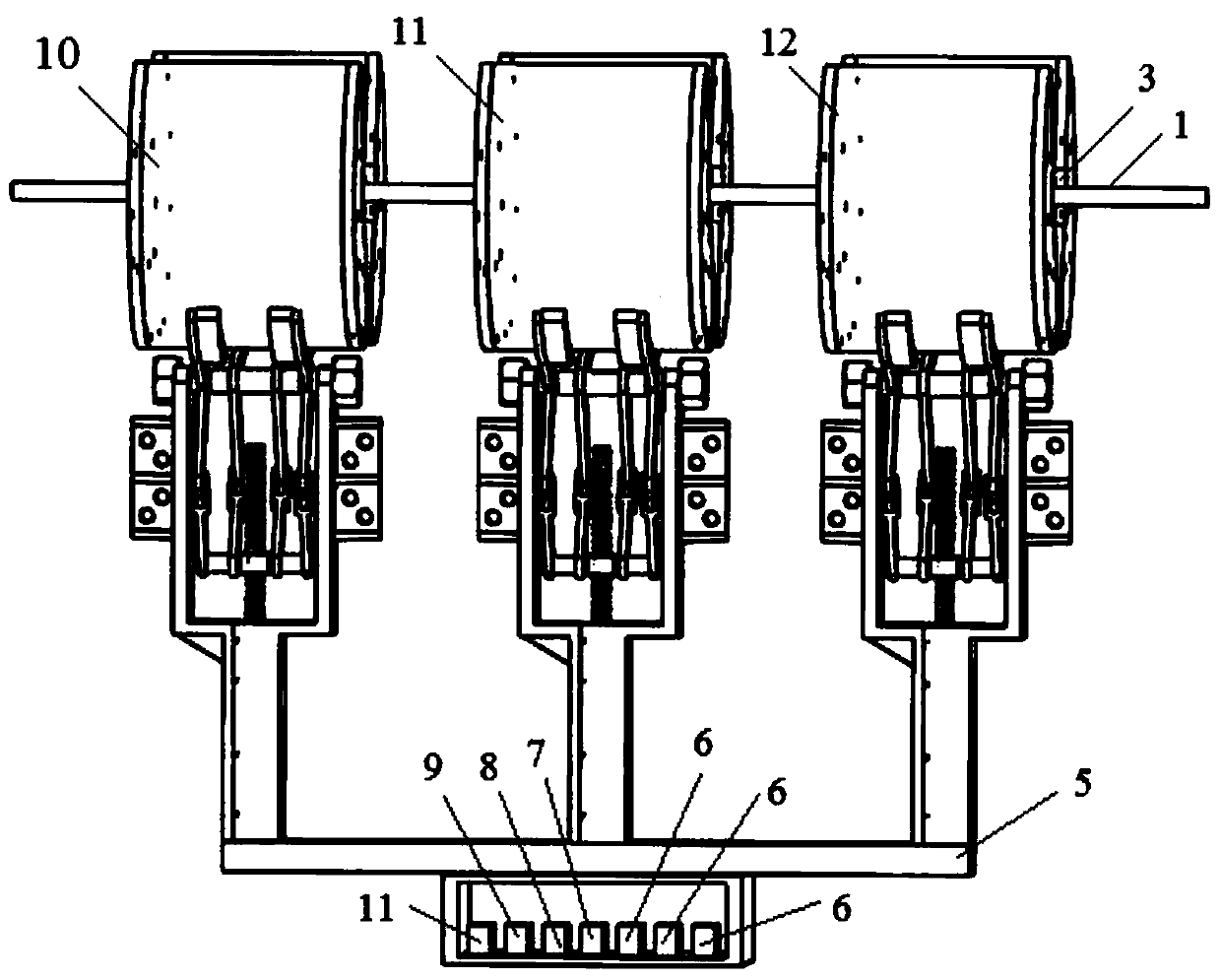
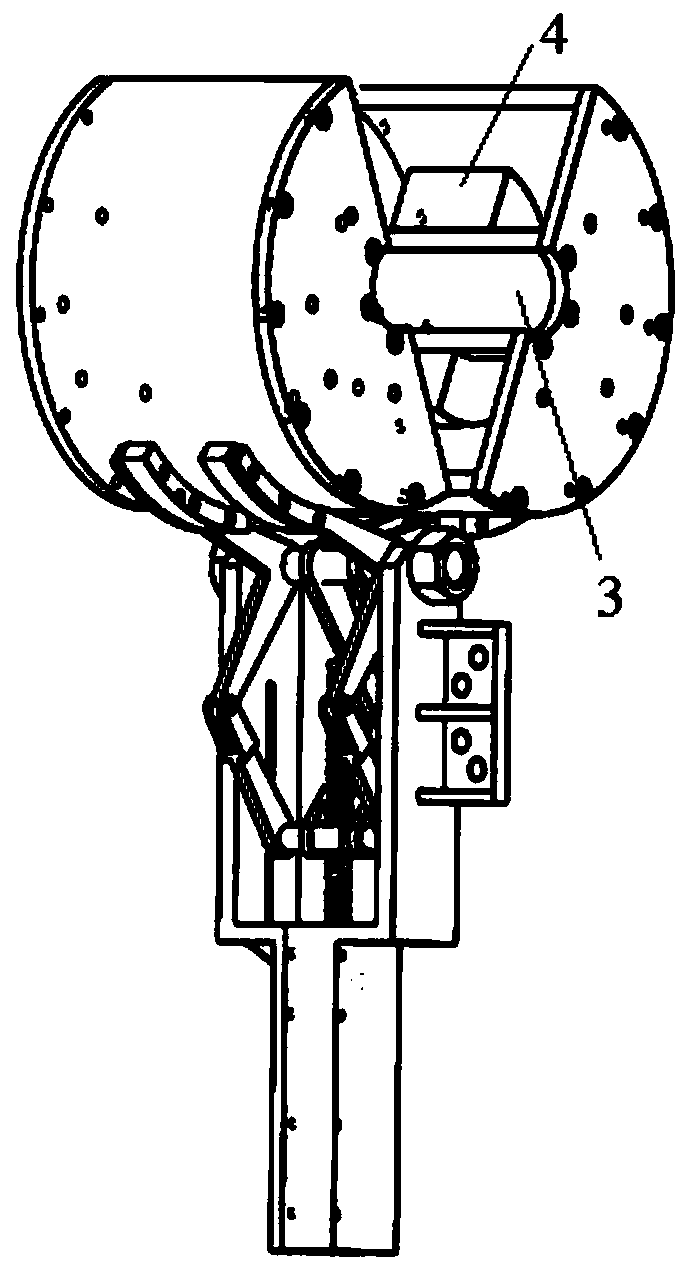
[0044] This disclosure mainly controls the current of the levitation coil in the magnetic levitation magnetic drive robot, and then realizes the control of the levitation force to ensure that the robot can stably pass through various obstacle structures encountered on the transmission line, even if the slope of the high-voltage transmission line changes, The suspension force can also be effectively controlled so that the robot is always in a suspension state.
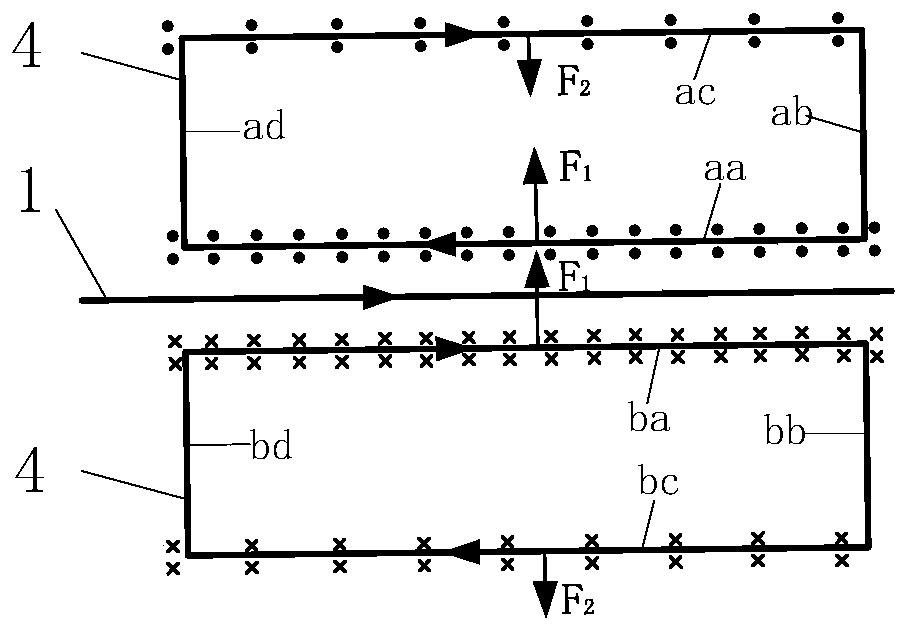
[0045] The levitation force of the high-voltage DC transmission line magnetic levitation robot is provided by the Ampere force. According to the formula F=BIL of the Ampere force, when the wire with current passes through the magnetic field area, the live wire will be affected by the Ampere force, and the direction of the Ampere force is determined by the left hand Judging by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More