Precision positioning device of manipulator for L-shaped high-pressure pipe joint feeding
A technology of precise positioning and high-pressure tubes, applied in manipulators, program-controlled manipulators, metal processing, etc., can solve the problems that manipulators are not suitable for manual operation, the range of manipulator activities is fixed, and the composition and splicing are cumbersome, so as to increase the range of lateral activities and increase The effect of vertical range of motion and easy operation of the device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
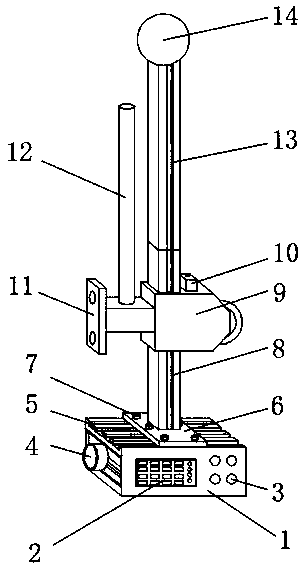
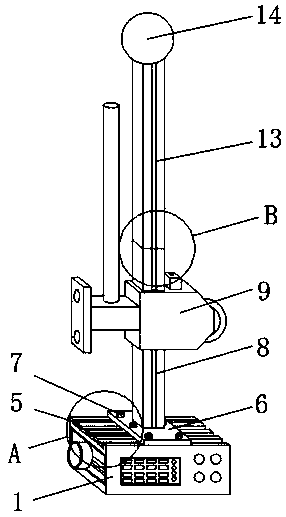
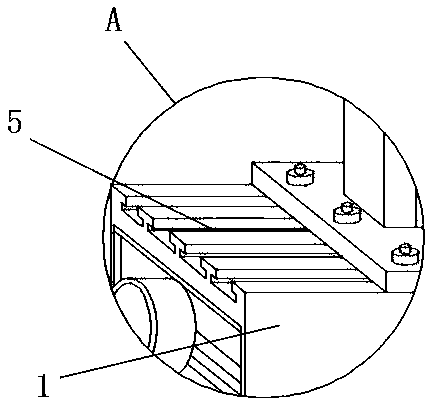
[0018] Such as Figure 1-5 As shown, an L-shaped high-pressure pipe joint feeding manipulator precise positioning device includes a locator main body 1 and a sliding seat 9. The outer surface of the front end of the locator main body 1 is fixedly mounted with a driving data interface 2, and the driving data interface 2 One side of the outer surface is provided with an indicator light 3, one end of the outer surface of the main body of the locator 1 is fixedly installed with a positioning probe 4, and the outer upper end of the main body of the locator 1 is fixedly installed with a T-shaped rail 5, above the outer surface of the main body of the locator 1 There is a mounting plate 6, and the outer upper end of the mounting plate 6 is fixedly instal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com