

Time-associated design method of robot visual taste auditory sense
A technology of robot vision and design method, which is applied in the direction of instruments, calculations, special data processing applications, etc., and can solve problems such as lack of visual, taste and auditory correspondence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
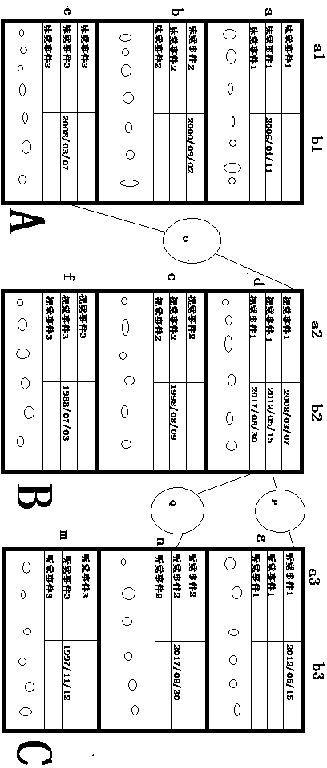
[0006] It will be clearer to illustrate with the structure of the attached drawings. The robot of this design has three kinds of mechanical organs, visual organs, auditory organs, and taste organs. When designing this kind of robot, storage space is allocated to these three organs. The storage space is defined as a collection. The robot will continuously input external information. After processing, it will be stored in its own collection, and it will be stored together with the time that occurred at that time, and the collection will be classified. Input at different times The same event constitutes a subset. If multiple organs receive information at the same time and need to be saved after processing, the time of occurrence is also saved at the same time, and association is made through time. The specific example is as follows. When auditory event 2 is activated externally, then Just search in the subset of auditory event 2. For example, you can only find that the event occur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More