

Multi-robot cooperated operation task description method
A multi-robot, task-based technology, applied in the field of intelligent robots, can solve problems such as low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0087] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, wherein the schematic embodiments and descriptions are only used to explain the present invention, but are not intended to limit the present invention.
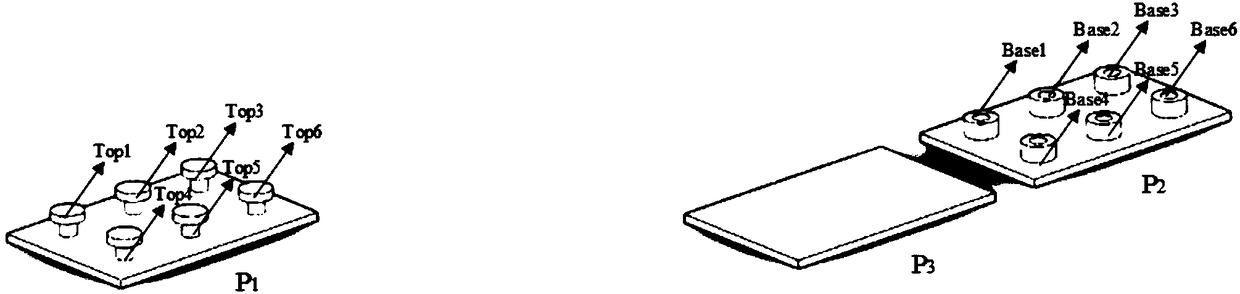
[0088] Such as figure 1 As shown, it is a schematic diagram of the initial state of the robot operation object in the specific embodiment of the present invention. Among them, each part Base stores the workbench P 2 On the workbench, each part Top is stored on workbench P 1 superior. Bench P for assembly and storage 3 at P 2 nearby; P 3 away from P 1 far.
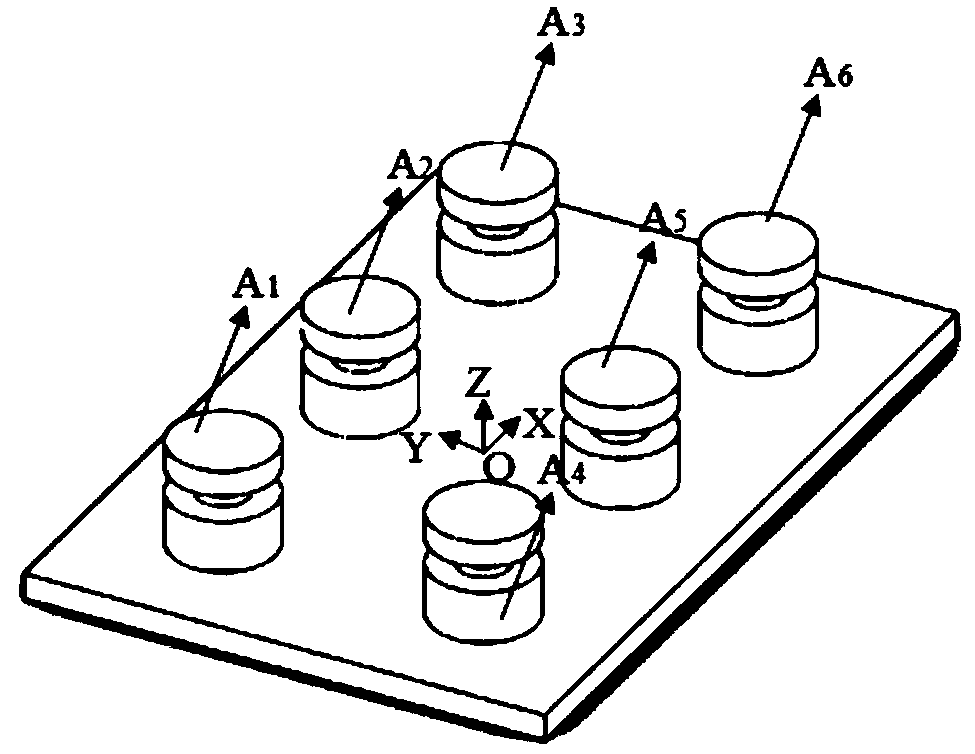
[0089] As shown in FIG. 2 , it is a schematic diagram of the target general task in the specific embodiment of the present invention. The total target task is recorded as Task, and the robot operation unit is required to complete the assembly of 6 identical assemblies A, and place them vertically on P 3 ,Such as Figure 2a , 2b sho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More