Flexible anti-impact bionic pulled and pressed body knee joint
An impact-resistant, knee-joint technology, applied in the field of robotics, can solve problems such as increased energy consumption, easy damage to rigid knee joints, and joint impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] The present invention will be further analyzed below in conjunction with accompanying drawing.
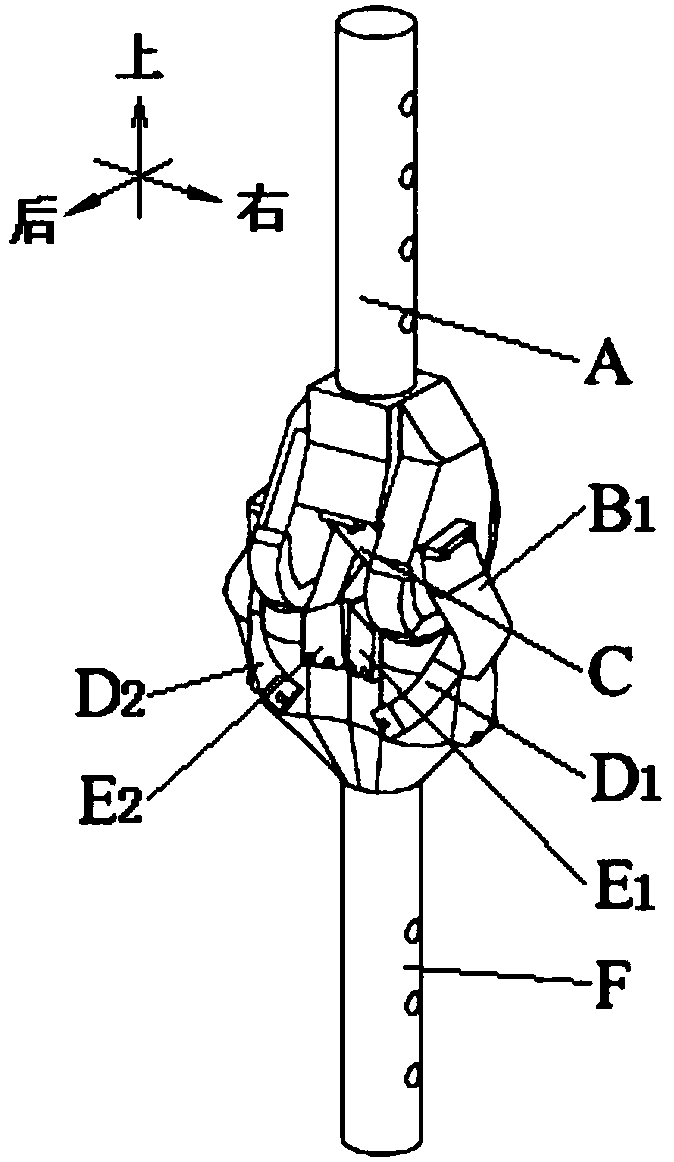
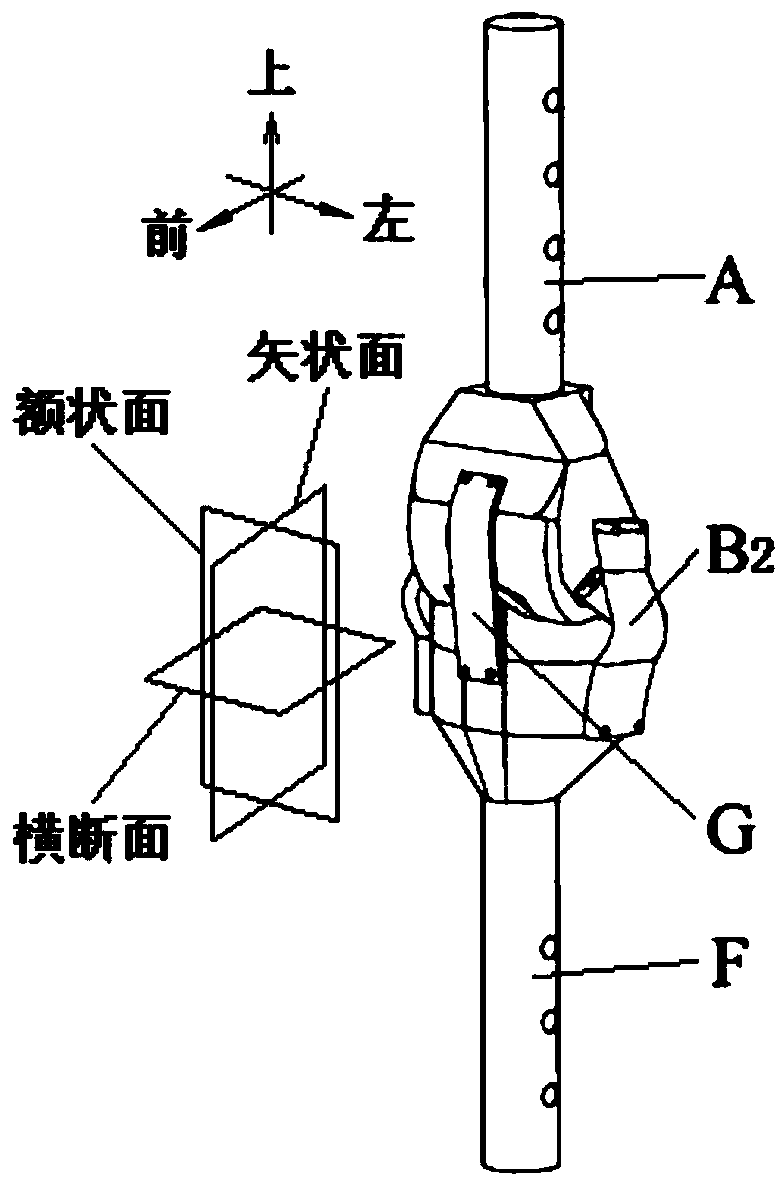
[0099] Such as figure 1 , figure 2 As shown, the present invention consists of bionic femur A, right side bionic flexible lateral ligament B 1 , Left bionic flexible lateral ligament B 2 , bionic flexible anterior cruciate ligament C, right bionic flexible popliteal ligament D 1 , Left bionic flexible popliteal ligament D 2 , Right bionic flexible posterior cruciate ligament E 1 , Left bionic flexible posterior cruciate ligament E 2 , bionic tibia F and bionic flexible patellar ligament G, of which the right bionic flexible lateral ligament B 1 Through its upper end bolt group Ⅰ23, it is threadedly connected with the threaded hole group Ⅲ5 of the bionic femoral condyle 2 in the bionic femur A; the right bionic flexible lateral ligament B 1 Through its lower end bolt group I24, it is threadedly connected with the threaded hole group XI15 of the bionic tibial condyle 1...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Total height | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More