

Road running and virtual test parallel mapping experiment method of intelligent automobiles
A smart car and virtual testing technology, which is applied in vehicle testing, electrical testing/monitoring, testing/monitoring control systems, etc., can solve problems such as the inability to guarantee the authenticity of test scenarios, difficult complex environments for smart cars, and high traffic safety risks , to achieve the effect of improving test efficiency, safety evaluation, comprehensive reliability, and safety guarantee
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
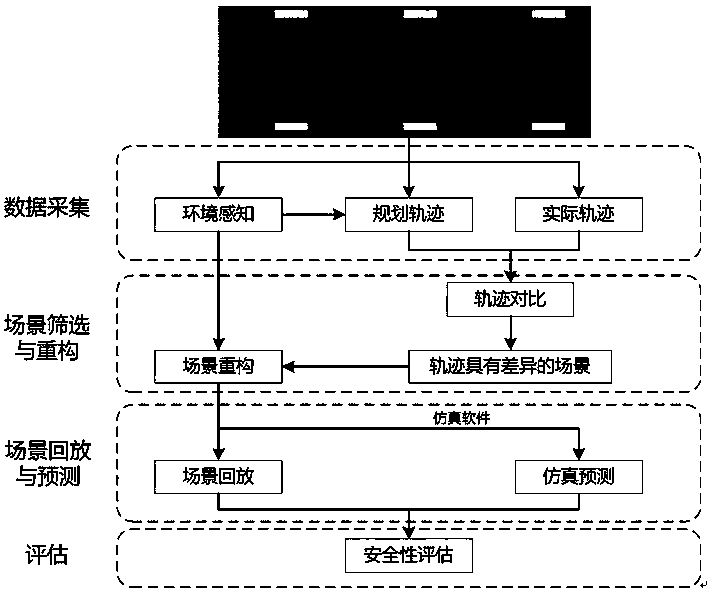
[0033] The implementation location of this embodiment is Shanghai. Through the data obtained by multiple drivers driving smart cars equipped with automatic driving on the actual roads in Shanghai, the actual trajectory is compared with the planned trajectory, and the scene with a significant difference in trajectory is found. A parallel mapping experiment was conducted to evaluate the safety of the smart car, including the following detailed steps:
[0034] (1) Collect the vehicle's driving trajectory, perception information and planning driving trajectory:
[0035] Collect the driving trajectory of the driver driving the smart car on the actual road in Shanghai, including the vehicle position coordinates, speed, steering angle and other information with time stamps. Collect smart car perception information, including location information of surrounding obstacles, lane information, etc. Collect the planned driving trajectory given by the smart car through the perception modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More