

Tele-operation mechanical arm three-dimensional obstacle avoidance method based on virtual thrust
A robotic arm and teleoperation technology, which is applied in the field of robotic arm motion planning, can solve the problems of large end trajectory tracking error, difficulty in achieving obstacle avoidance, and large amount of calculation, and achieves good obstacle avoidance effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
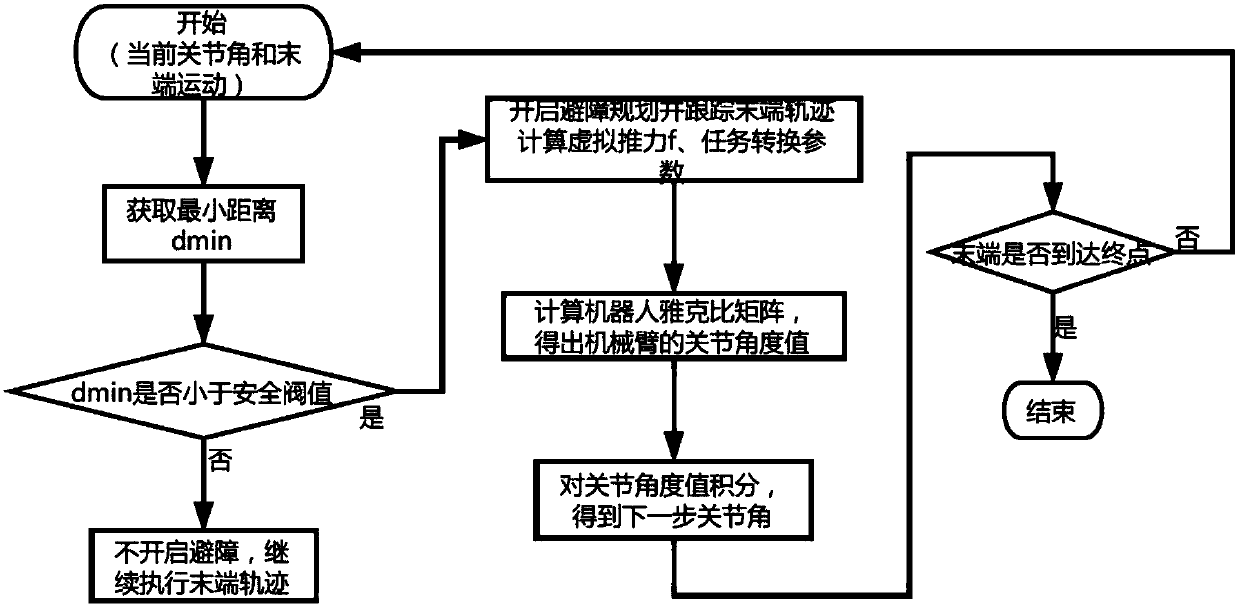
[0045] Such as figure 1 Shown is the flow chart of the three-dimensional obstacle avoidance algorithm of the teleoperated manipulator.
[0046] The teleoperated robot UR5 is set as the starting point from the position of the end effector of the arm, the given end point is set as the target point, and the trajectory of the end effector is a given helical curve. The three-dimensional motion environment of the teleoperated manipulator is defined as the task work area. Cylindrical obstacles existing in the 3D working environment are defined as obstacle points. The present invention mainly focuses on the motion of the teleoperated manipulator avoiding space obstacles and reaching a specified target point during the process of tracking a given terminal trajectory from a starting point in a three-dimensional working environment. Study the movement mode of the teleoperated robot from the arm to avoid obstacles during the collision-free path. In a three-dimensional environment, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More