

Electric-driven steering chassis
A technology of electric drive and chassis, which is applied in the direction of electric vehicles, steering mechanisms, steering rods, etc., can solve the problems of steering accuracy and steering response speed, inability to coordinate angles, poor adaptability to complex ground, etc., and achieve mutual follow-up flexibility Freedom and good coordination and consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings.
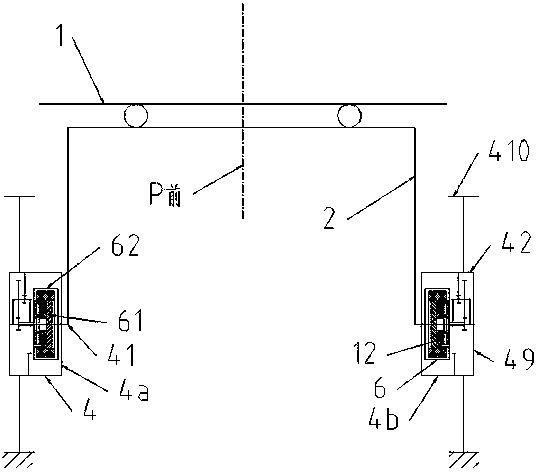
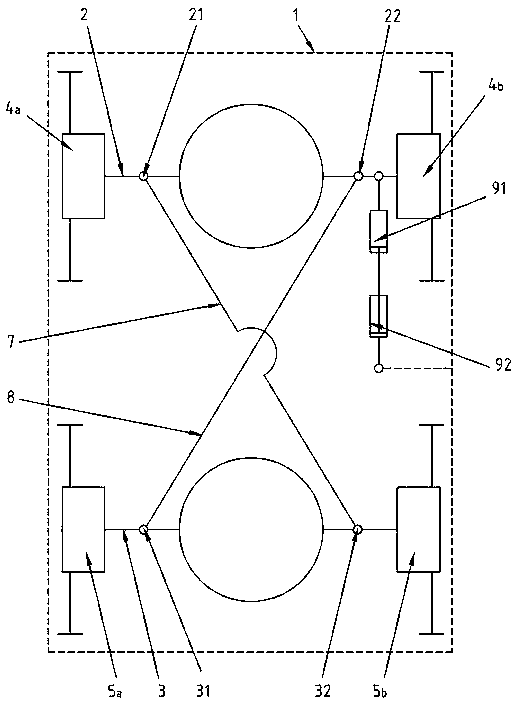
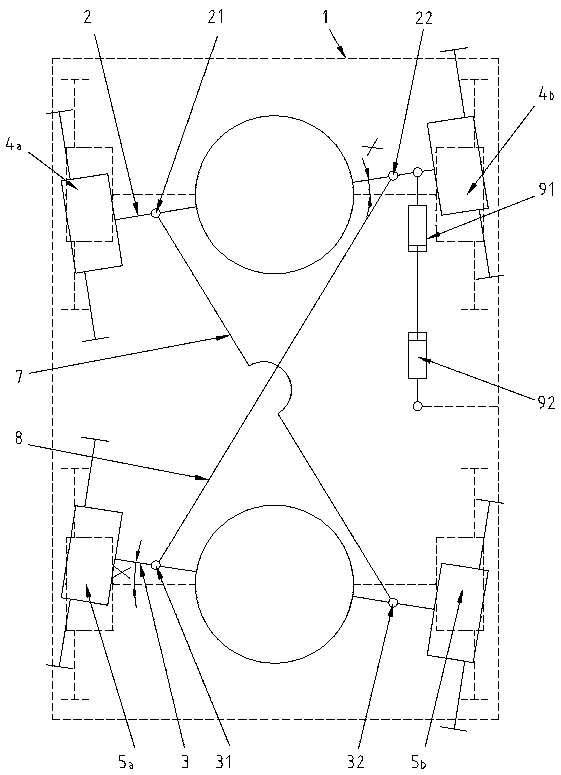
[0037] see figure 1 , 2 The electric drive steering chassis shown includes a chassis 1, a front frame 2, and a rear frame 3. The front frame 2 and the rear frame 3 are arranged on the lower part of the chassis 1 through rotating supports (such as bearings), and at both ends of the front frame 2. Two left and right front wheels 4 are set, and two left and right rear wheels 5 are set at the two ends of the rear vehicle frame 3. The left and right front wheels 4 are front wheels driven by two front wheel hub motors 6 respectively, and are used to control the left and right front wheels. The controller of the hub motor 6 is electrically connected to the front hub motor 6; a vertical front axis P is formed between the front frame 2 and the chassis 1 前 is the rotational connection of the center line; the rear frame 3 and the chassis 1 form a vertical rear axis P 后 It is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More