

CNC robotic arm with pick-up and clamping device
A technology of picking clips and manipulators, which is applied in the field of manipulators, can solve problems such as inability to pick up materials, take out materials that are not firm, and turn over, etc., and achieve the effect of simple structure, convenient clamping work, stable and fast clamping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
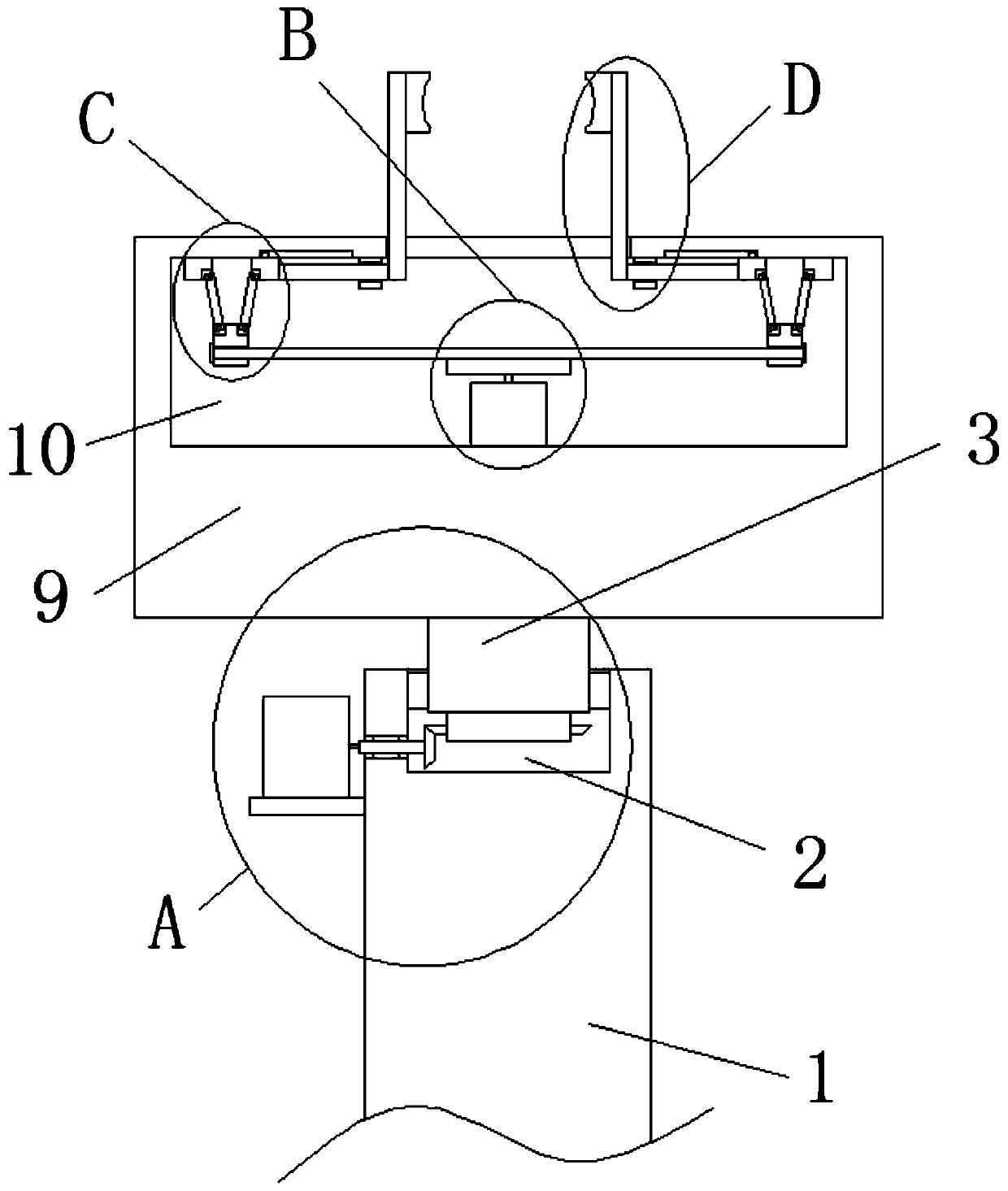
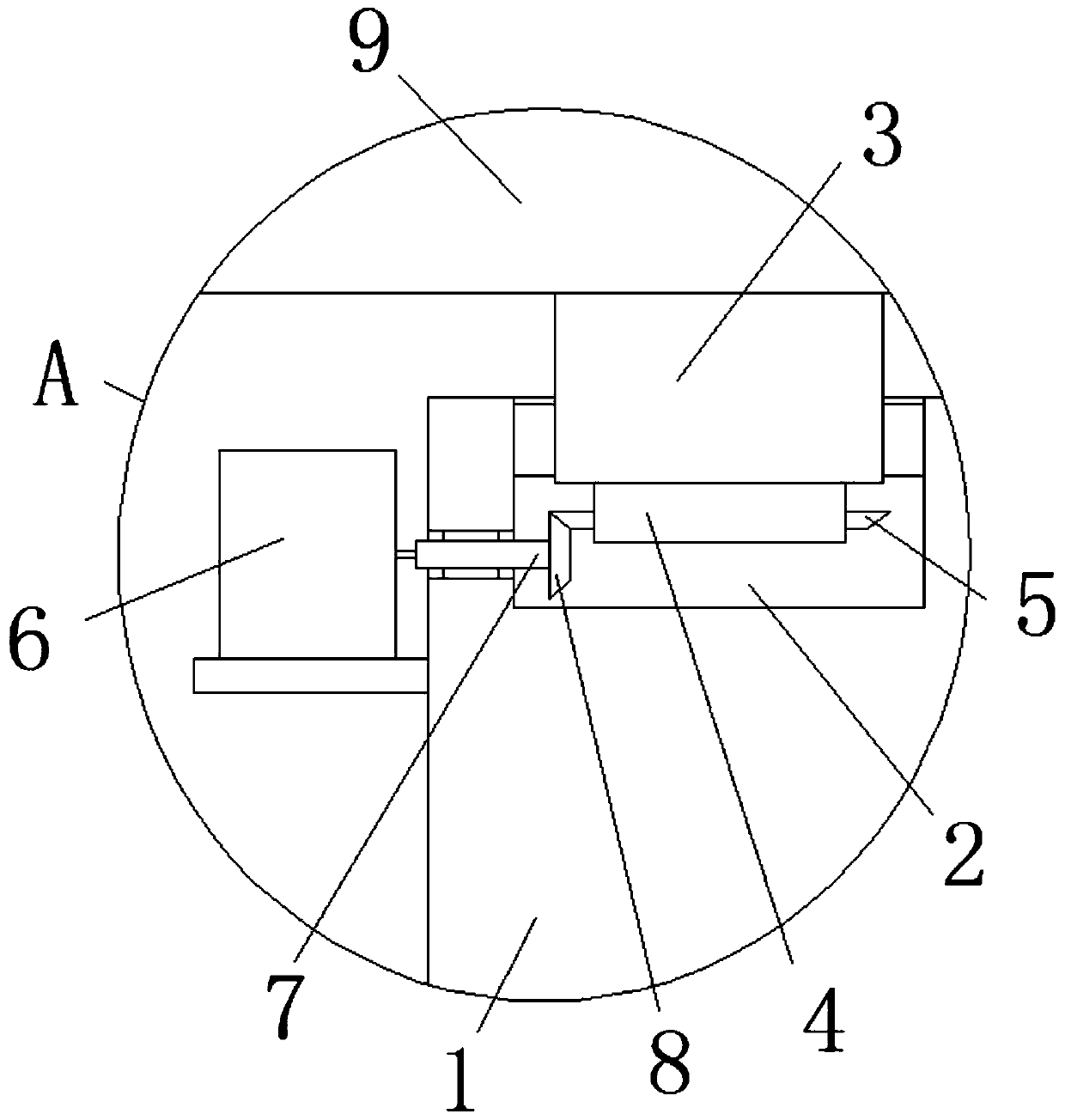
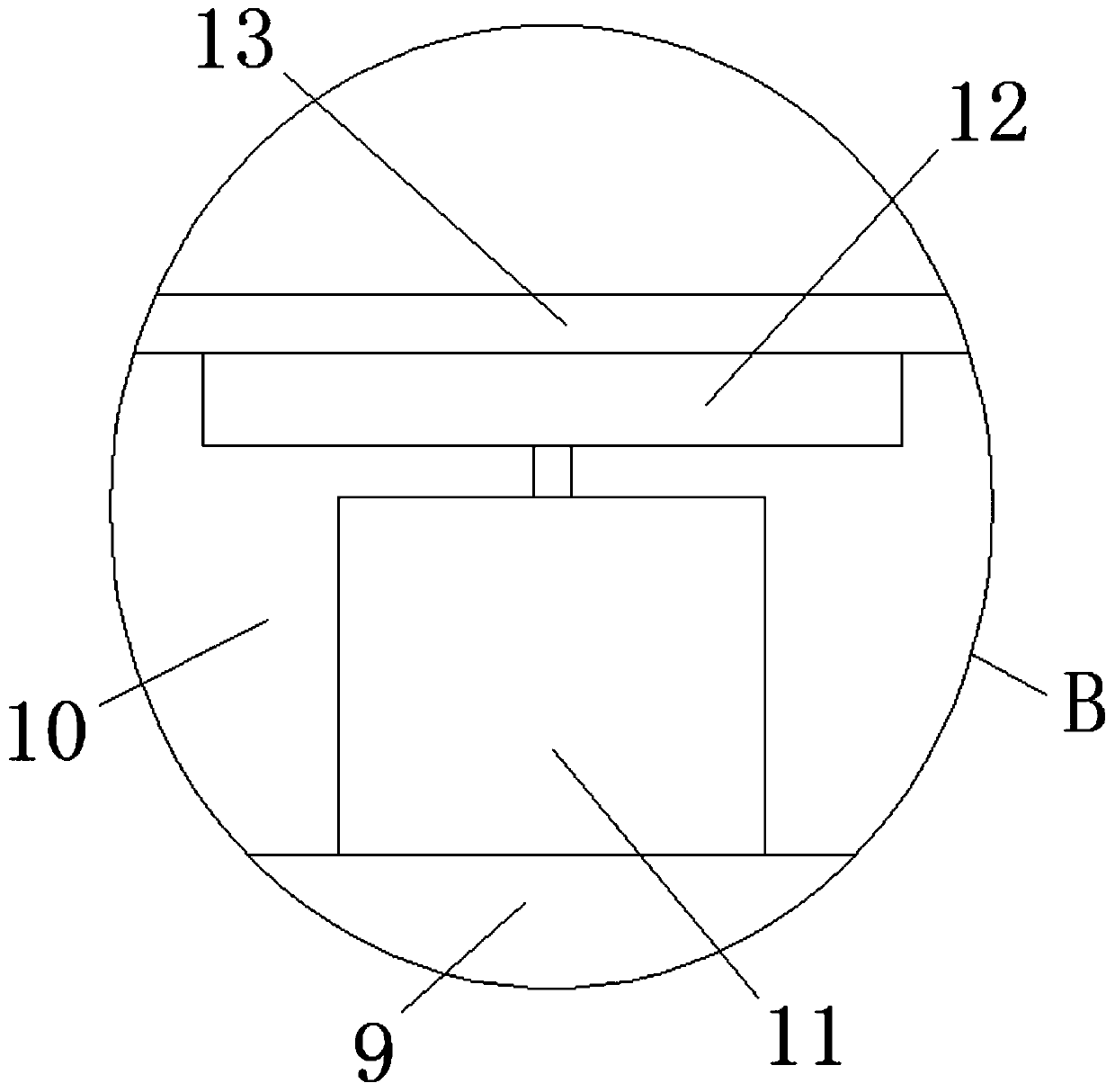
[0023] refer to Figure 1-5 , the present embodiment proposes a numerically controlled mechanical arm with a retrieving and clamping device, including a support arm 1, a mounting groove 2 is provided on the top of the support arm 1, and a first support column 3 is installed in the mounting groove 2 for rotation. The bottom end of the support column 3 is fixedly installed with the second support column 4, the outer fixed sleeve of the second support column 4 is provided with the first bevel gear 5, one side of the support arm 1 is provided with a motor 6, and on the output shaft of the motor 6 A first support rod 7 is fixedly installed, and the end of the first support rod 7 away from the motor 6 extends into the installation groove 2 and is fixedly sleeved with a second bevel gear 8 meshed with the first bevel gear 5; the first support The top of the column 3 extends to the top of the installation groove 2 and is fixedly installed with a support base 9. A cavity 10 is provided...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More