

An intelligent robot grabbing structure
A technology of intelligent robot and grasping structure, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of easily damaged objects, prone to slipping, and collision damage of objects, so as to improve stability, avoid falling off, and avoid slipping. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030]The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
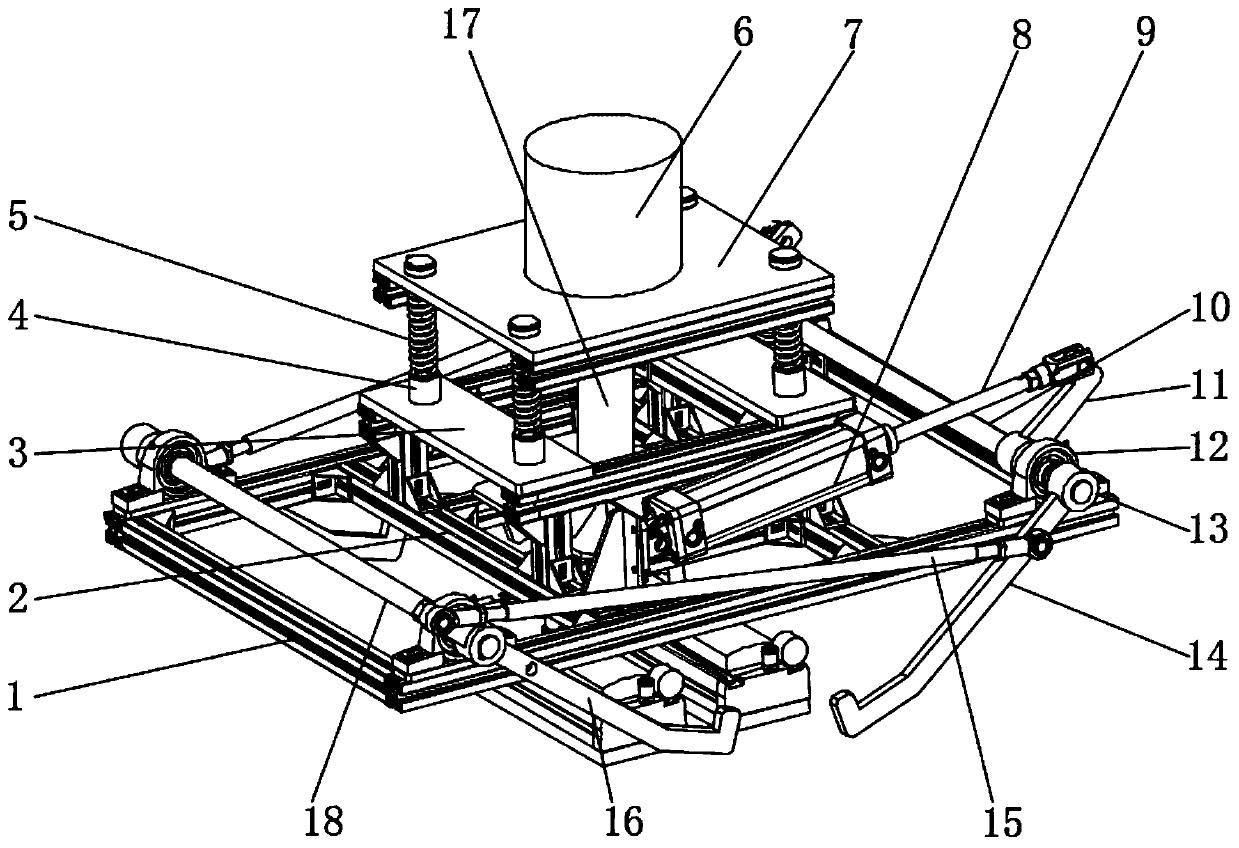
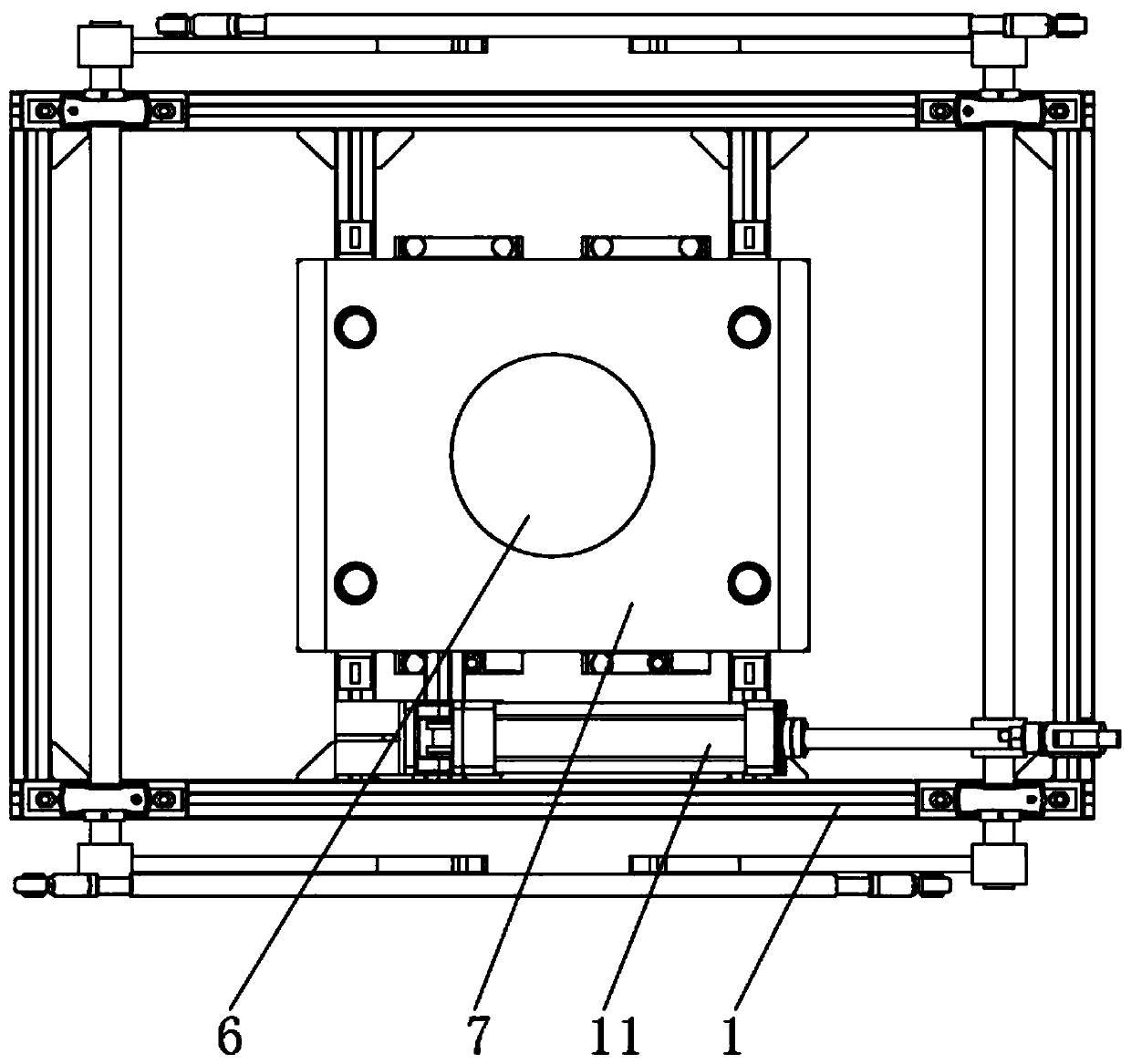
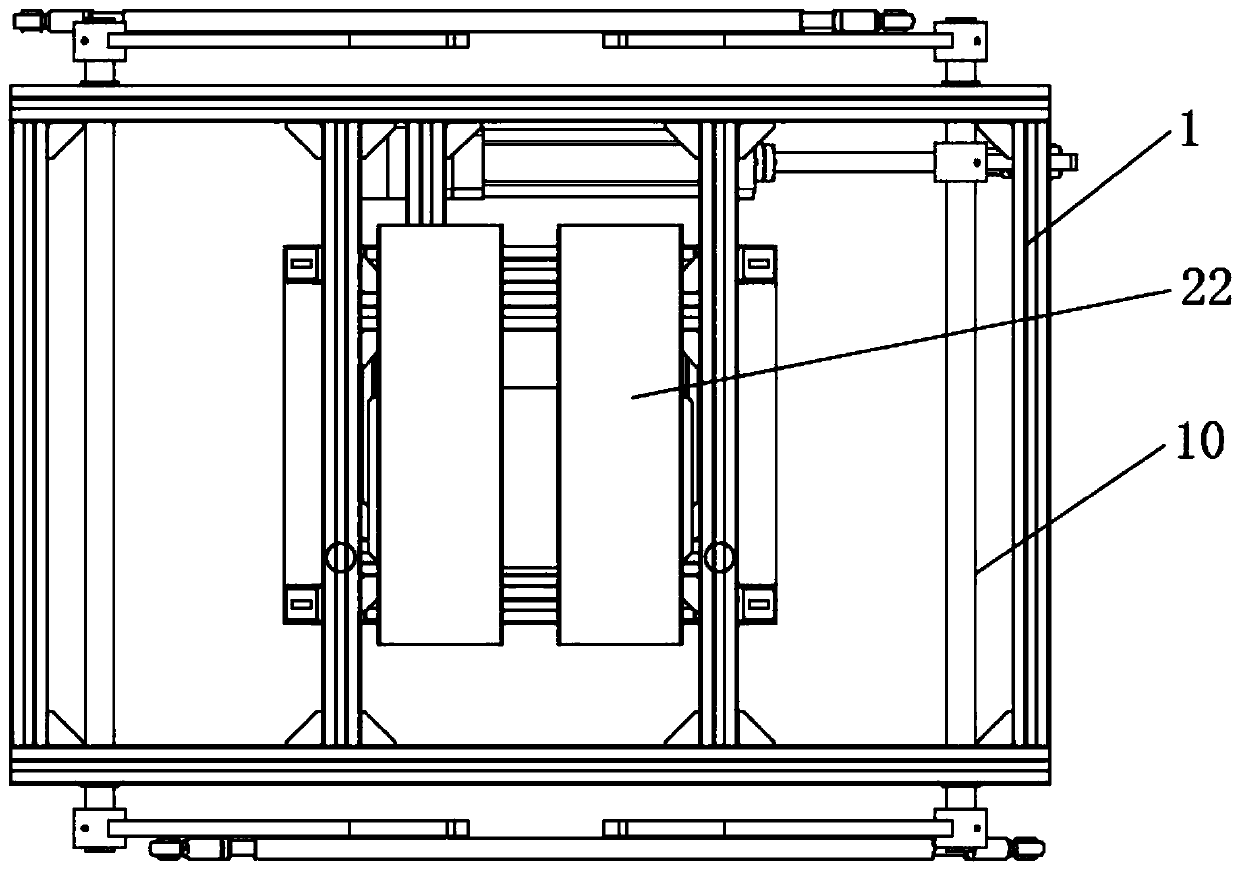
[0031] Such as Figure 1-6 As shown, an intelligent robot grasping structure includes an underframe 1, a middle plate 3 and a support plate 7. Two crossbeams 2 are arranged side by side in the middle of the underframe 1, and the tops of the two crossbeams 2 are fixedly provided with a middle Plate 3, the top four corners of the middle plate 3 are respectively welded with elastic rods 4, the top of the middle plate 3 is provided with a support plate 7, the four elastic rods 4 are all provided with springs 5, and the middle po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More