

Device and method for implementing compound drag-free mode for high-precision autonomous navigation
An autonomous navigation, no tow technology, applied in the field of no tow satellite systems, can solve problems such as light pressure interference, and achieve the effects of reducing interference, improving accuracy, and compact overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
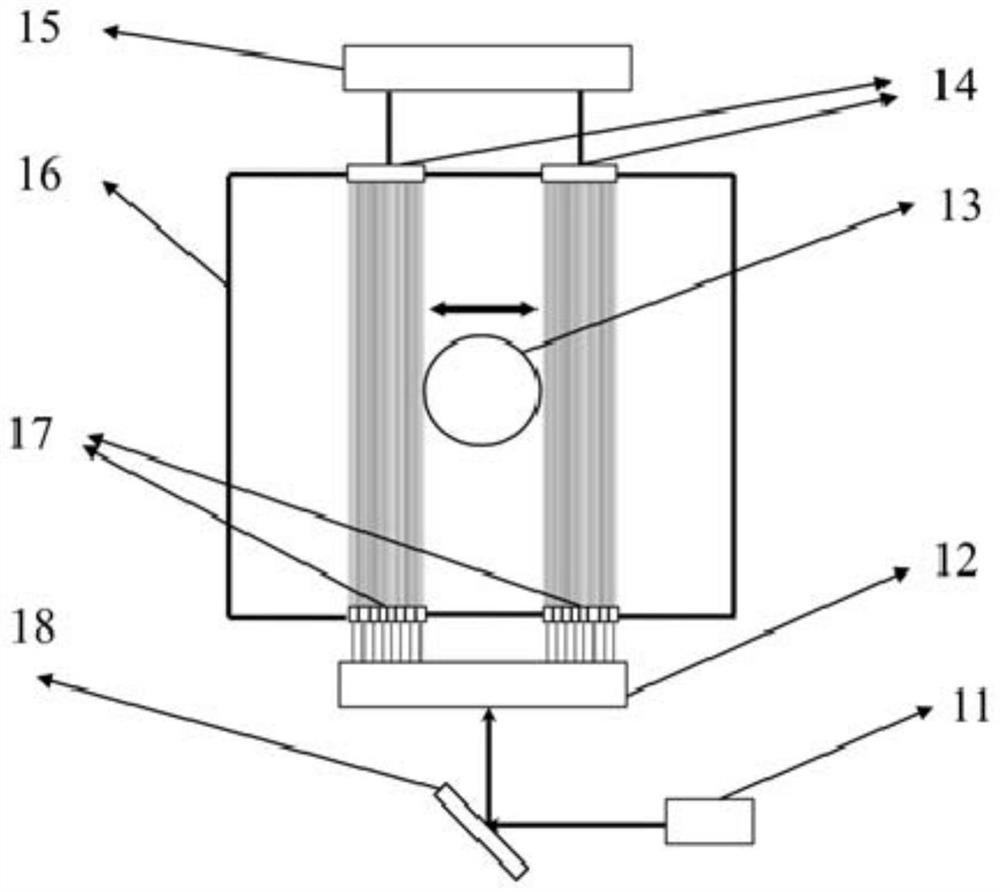
[0042] The present invention provides a device for realizing a composite drag-free mode for high-precision autonomous navigation, including a laser array 11 , a laser beam shaping device 12 , a proof mass 13 , a photoelectric conversion array 14 , a data processing module 15 , and a spacecraft cavity 16 , shaping the laser input window 17 and mirror 18, such as figure 1 shown.
[0043] The laser array 11 is composed of N lasers, where N is an even number and N is not less than 2. In this embodiment, the laser is a single-frequency laser of 1064 nm, which can provide a laser with stable power and frequency, the laser light intensity follows a Gaussian distribution, and the output power is in the order of milliwatts.
[0044] The mirror 18 adjusts the optical path of the N beams of laser light output by the laser array 11 and sends them to the laser bea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More