

Beidou navigation method based on fusion of robust adaptation and extended Kalman filtering
A technology of extended Kalman and Beidou navigation, applied in the field of Beidou navigation based on the fusion of robust adaptive and extended Kalman filter, can solve the problems of accurate error, insufficient results, disorder and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0055] Do this by following these steps:
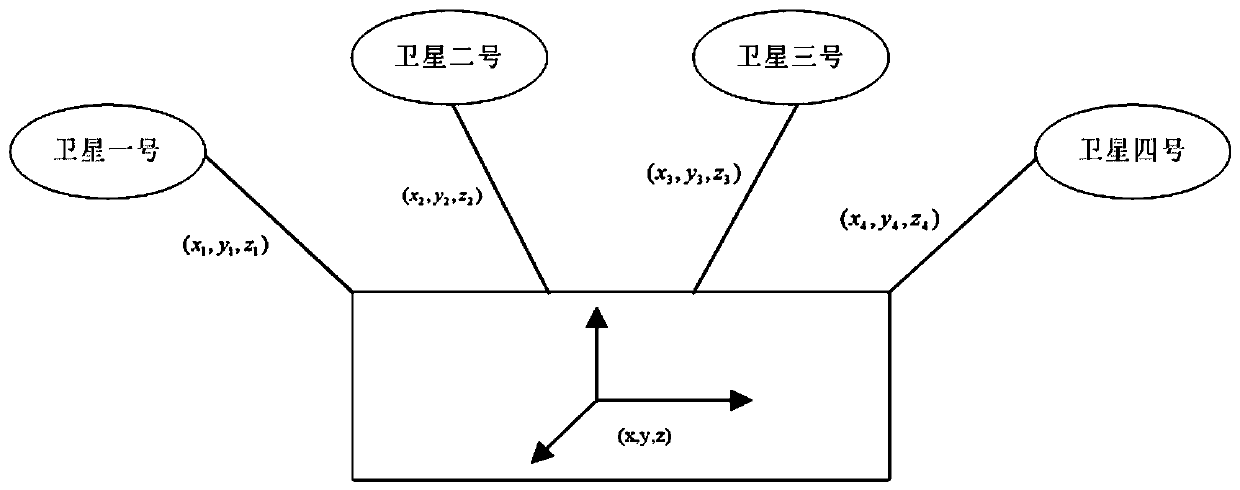
[0056] a). Obtain positioning data. Agricultural machinery uses the loaded Beidou positioning module to obtain positioning data (A, B, H) within a time period of t. Set the sampling period as T and the sample size as n; set the data in A, B, and H are processed through the following steps;
[0057] b).Establish the state observation equation with gross errors, because the obtained positioning data contains gross errors, which will make the state estimation Being disturbed, the state observation equation containing gross error is established as shown in formula (1):
[0058]
[0059] In the formula, is the m-dimensional state vector Z k The estimate of X k is the n-dimensional state vector of the system, H k is the m×n dimensional observation matrix; G k is the gross error interference matrix, consisti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More