

Track-deformable robot moving platform for dangerous hazard site environment
A field environment, mobile platform technology, applied in motor vehicles, tracked vehicles, manipulators, etc., can solve the problem of inapplicability of wheel-track conversion mechanism, achieve strong anti-overturning ability and obstacle-surmounting ability, strong track outer contour deformation ability, The effect of enhancing the ability to overcome obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
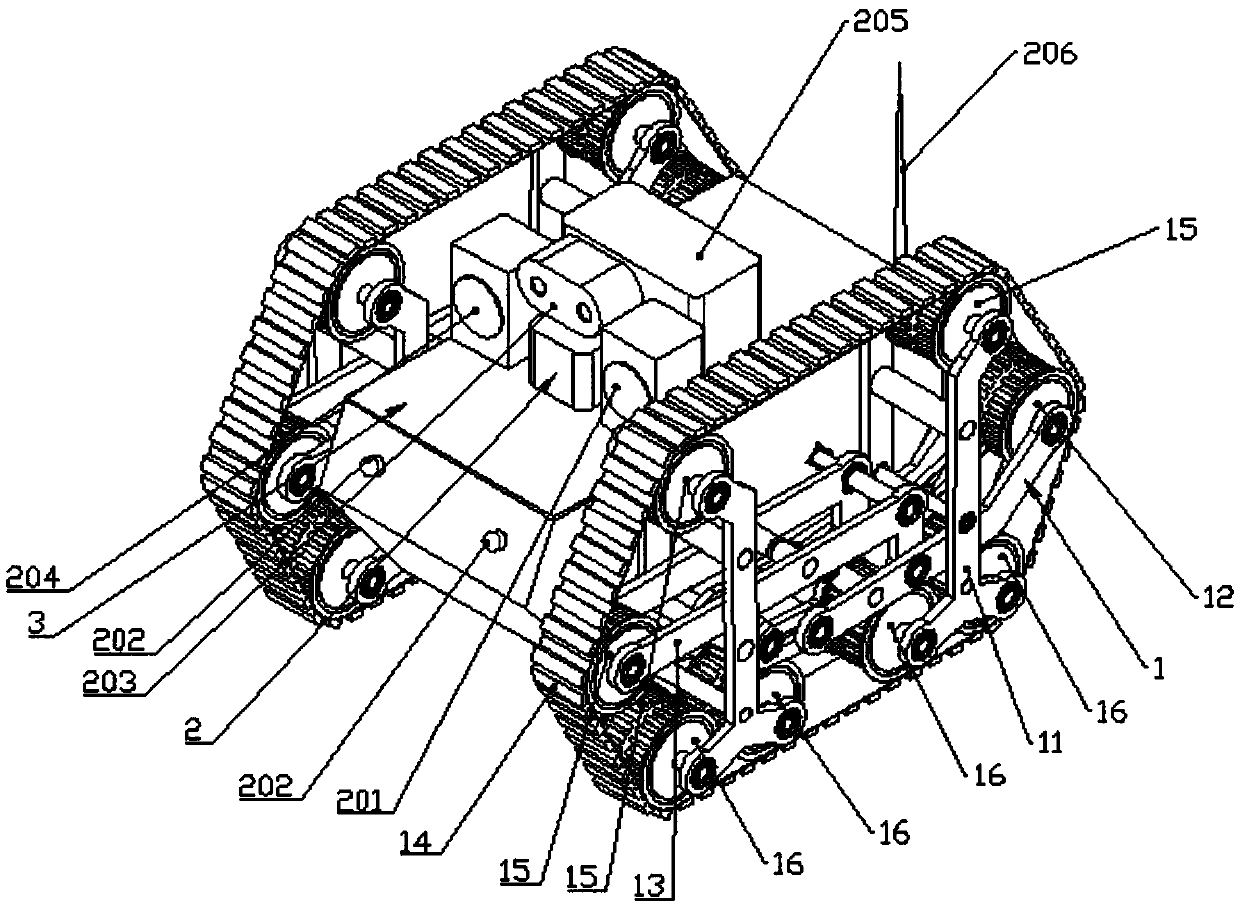
[0057] In this embodiment, the crawler deformable robot mobile platform for dangerous disaster site environment includes a robot body 3, two passive self-adaptive crawler modules 1 arranged symmetrically on the robot body and an information collection module 2 installed on the robot body;
[0058] The information collection module 2 includes a vital sign detection component and a video detection component 203, a two-way voice component 201, a toxic gas detection component 204, a rescue material component 205 and a distance sensor 202;
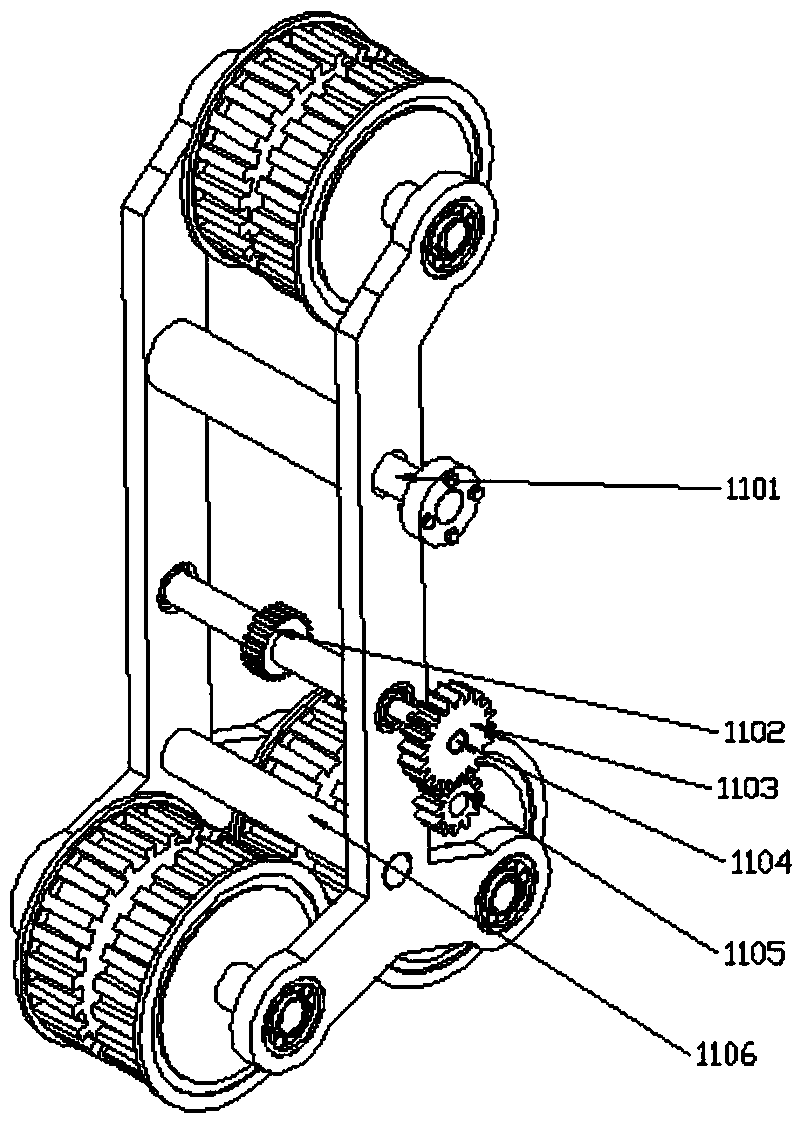
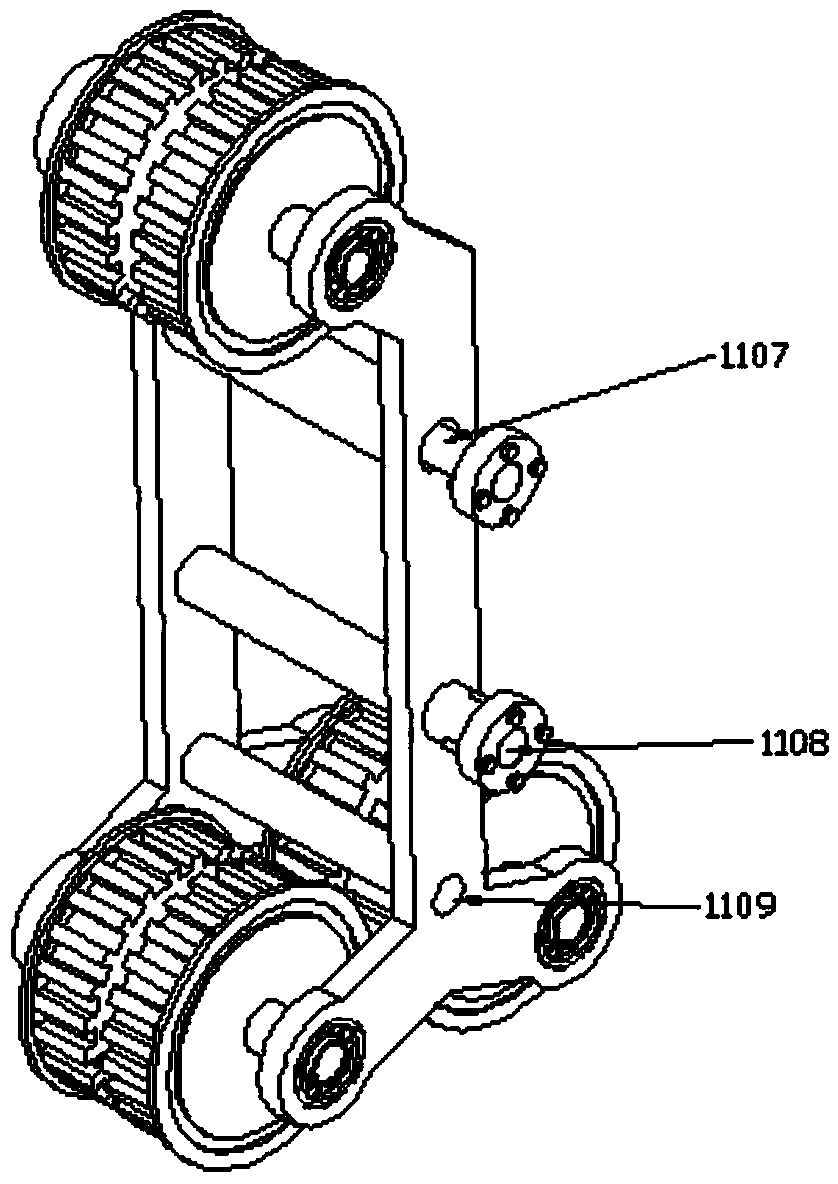
[0059] Each passive self-adaptive track module 1 comprises track 14, passive adaptive mechanism 13, four fixed support frames 11, three track driven wheels 15, four track load-bearing wheels 16, a track drive wheel 12, and the fixed support frames are It is an inverted Y-shaped frame, and two fixed support frames form a group. The two fixed support frames in one group are connected symmetrically from left to right through corresponding connectin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More