

A trajectory tracking control method for intelligent vehicles under extreme conditions
A smart car and trajectory tracking technology, applied in the direction of control devices, etc., can solve problems such as complex controller design, increased difficulty in solving, and difficulty in ensuring real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
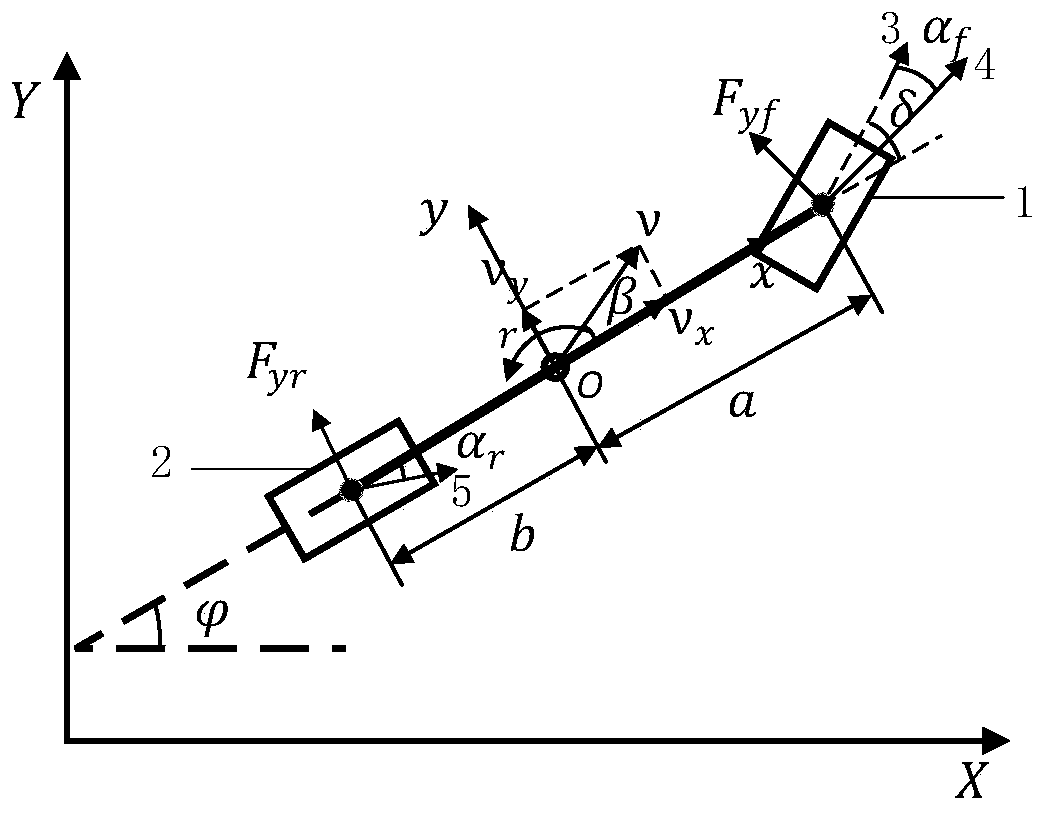
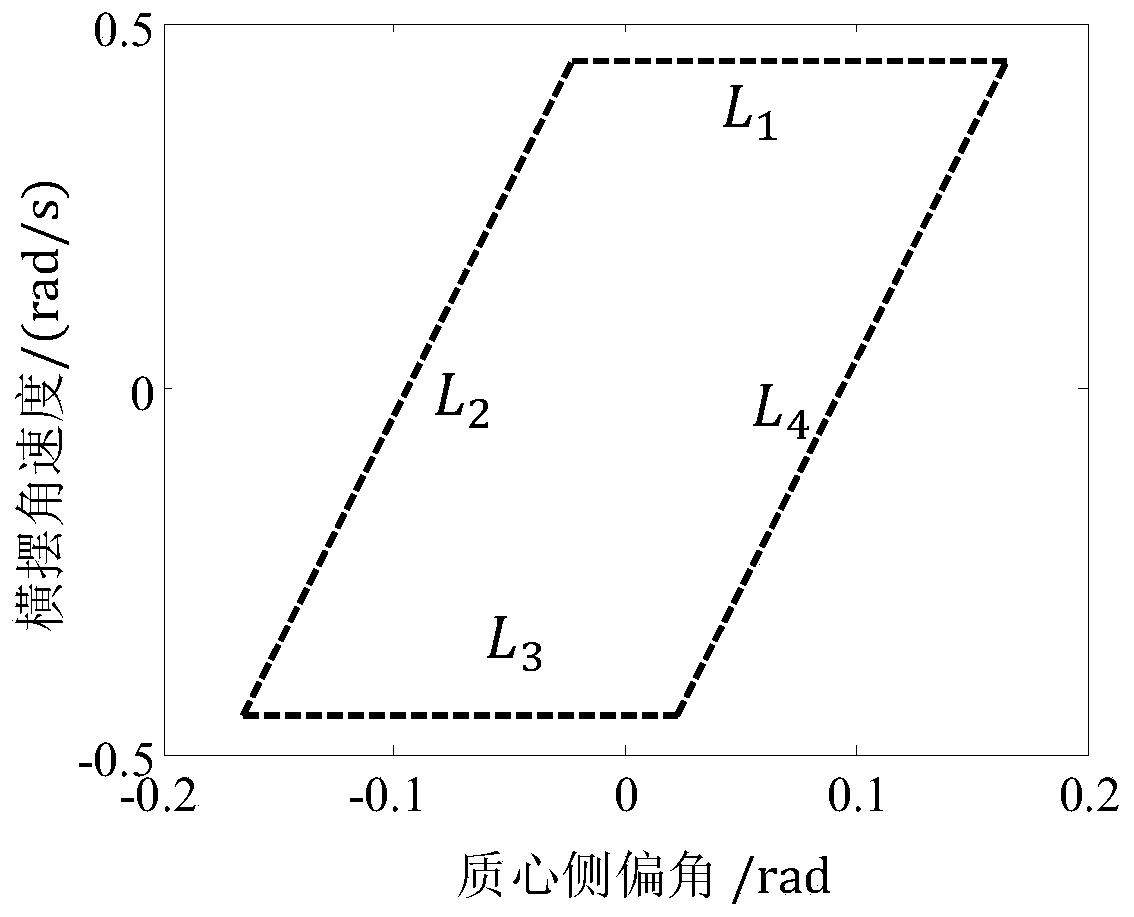
[0068] The intelligent vehicle trajectory tracking control method under extreme working conditions proposed by the present invention takes into account the design requirements of the controller, establishes a nonlinear vehicle dynamics model, and uses the β-r phase trajectory diagram based on this model to analyze the stability of the vehicle during steady-state steering , the stability boundary of the vehicle steering is obtained; the nonlinear model is linearized, and the linear vehicle dynamics model is obtained; the linearized vehicle dynamics model is used as the prediction model, and the steering stability region is used as the safety constraint, and the tire is designed -The track tracking controller of the smart car when the road surface adheres to the limit, to realize the stable and safe driving of the smart car.
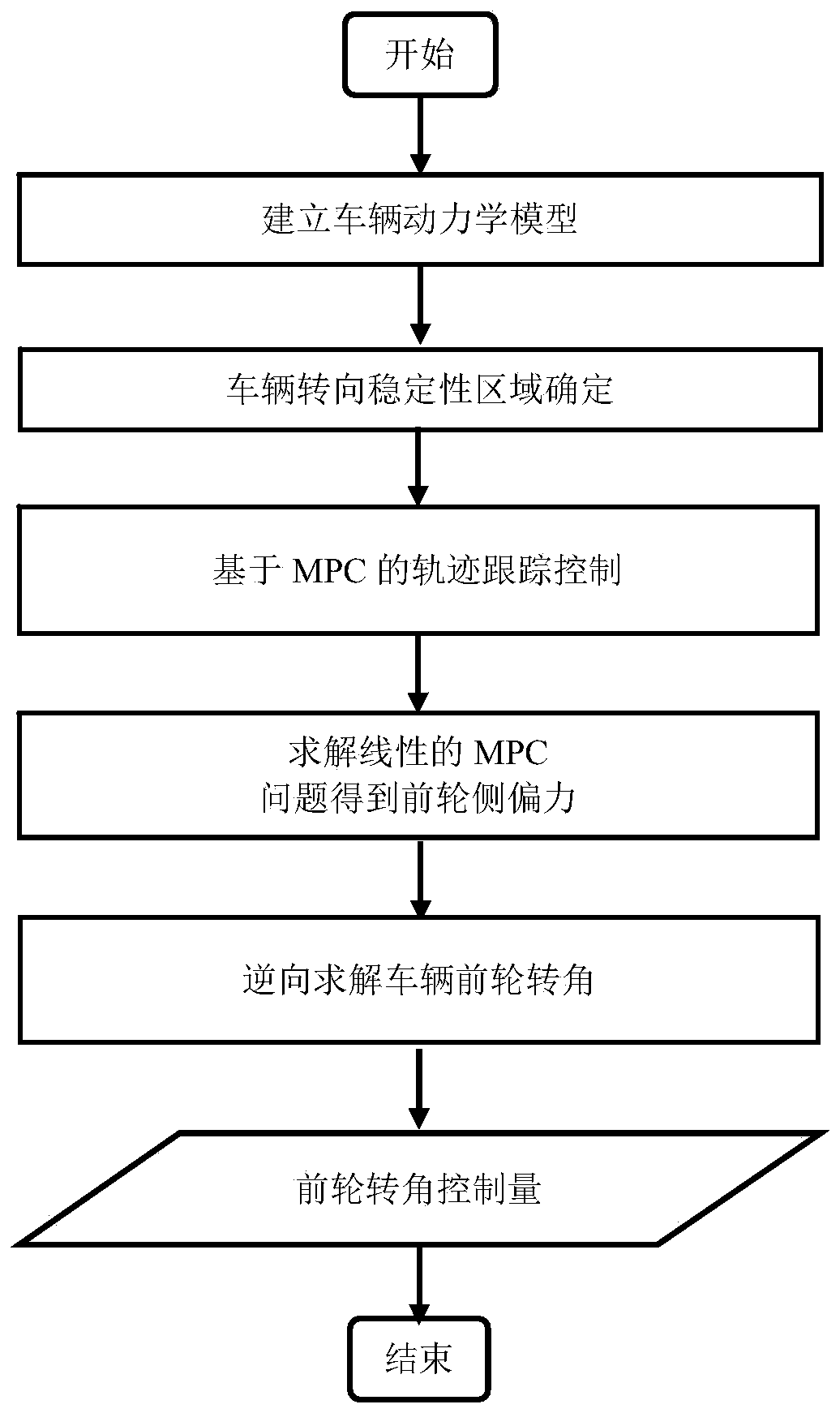
[0069] The smart car trajectory tracking control method of extreme working conditions of the present invention, its flow chart is as follows figure 1 show...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More