

Self-localization and self-tracking method of maneuvering flying target with single radiation source
A technology of maneuvering flight and radiation source, applied in positioning, instruments, complex mathematical operations, etc., can solve the problem of self-positioning and self-tracking of a single radiation source maneuvering flight target, and achieve the effect of improving wide adaptability and tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
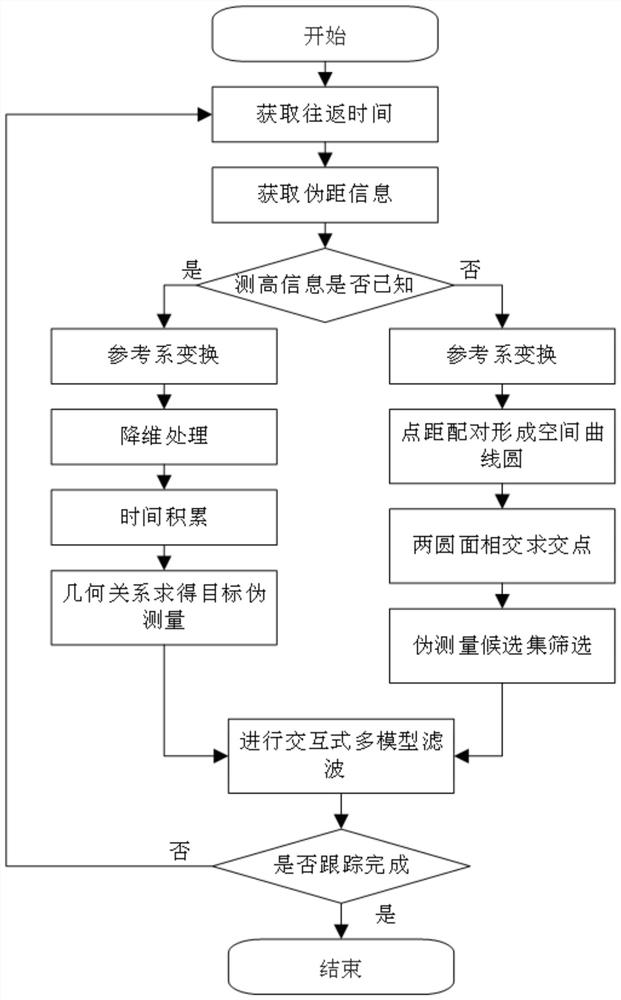
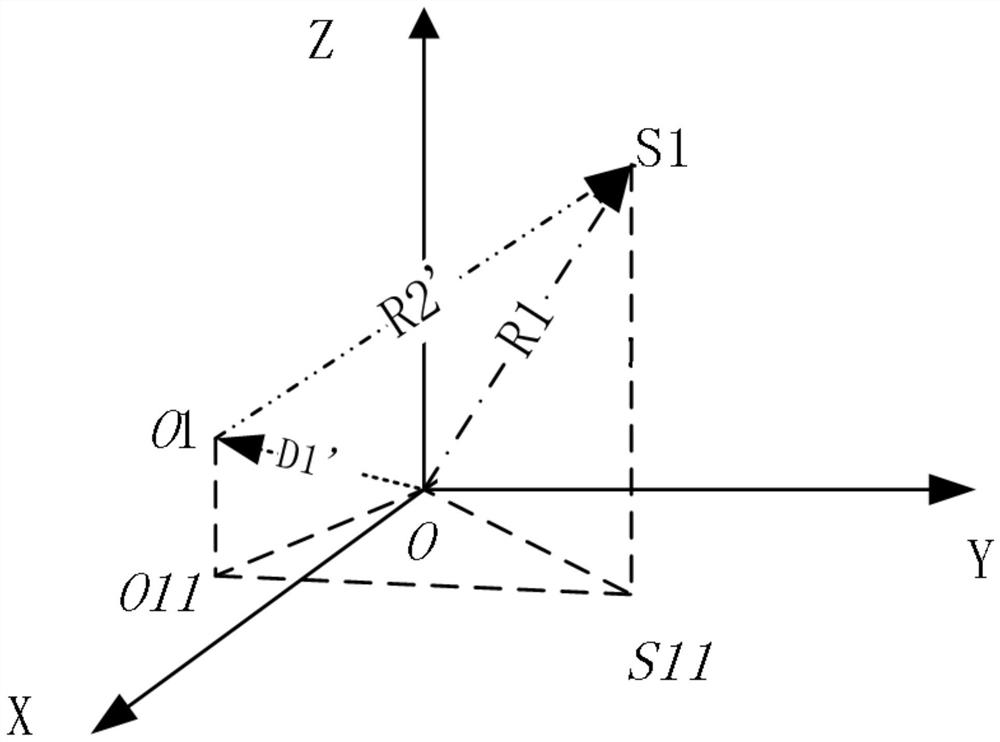
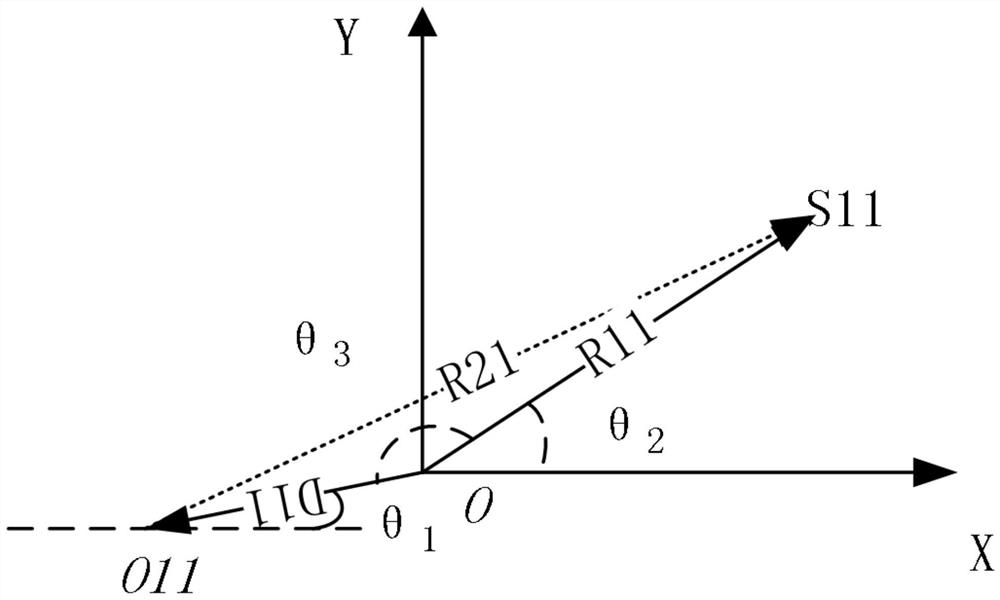
[0043] Specific implementation mode one: combine figure 1 , figure 2 , image 3 , Figure 4 The present embodiment is described. The self-positioning and self-tracking method of the single radiation source maneuvering target provided in the present embodiment specifically includes the following steps:
[0044] Step 1, the maneuvering target receives the round-trip time from the maneuvering target to a single radiation source in real time, thereby obtaining real-time pseudo-range information;
[0045] Step 2. Obtain the altimetry information of the maneuvering target. If the altimeter information of the maneuvering target can be obtained, the relative motion time accumulation self-positioning pseudo-measurement acquisition algorithm is used to obtain the pseudo-measurement of the maneuvering target, so as to realize the maneuvering target Self-positioning; if the altimetry information of the maneuvering flight target cannot be obtained, the pseudo-measurement acquisition al...
specific Embodiment approach 2
[0066] Specific implementation mode two: as Figure 5 As shown, the difference between this embodiment and the first embodiment is that the specific process of interactive multi-model filtering described in step three includes:
[0067] The Interacting Multiple Model (IMM) algorithm assumes multiple filtering models to fully describe the maneuvering target. The input interaction step is completed by calculating the model probability and model transition probability during the filtering process. The data after interaction It is the model input of IMM. The model probability is updated through the model probability estimator. Finally, different models are interacted through the interactor to obtain the fusion value of multiple model states and corresponding covariances. After estimating the mixer, the result is output.
[0068] Step 31. Input interaction:
[0069] Assuming that the interactive multi-model is composed of n sub-models, the initial state of each sub-model is inter...
specific Embodiment approach 3
[0077] Embodiment 3: This embodiment differs from Embodiment 2 in that the sub-model described in step 31 is a Kalman filter model.
[0078] Other steps and parameters are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More