

Soft manipulator embedded with rubber hoses
A technology of rubber hoses and manipulators, applied in manipulators, chucks, manufacturing tools, etc., can solve the problems of complex environment, poor environmental adaptability, and low transmission efficiency, and achieve the effect of eliminating complex processes and improving adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
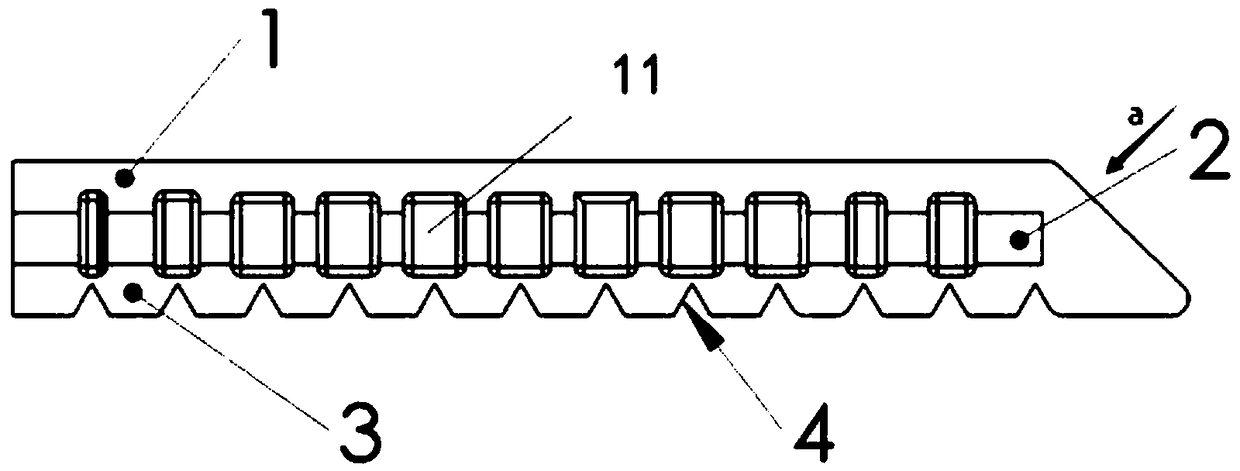
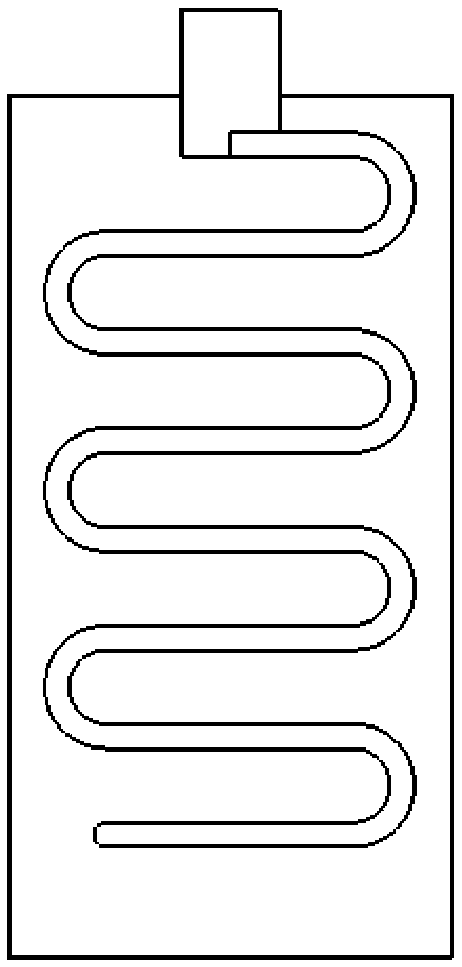
[0030] Such as Figure 6 As shown, a soft manipulator embedded in a rubber hose includes 3 soft tentacles of the same specification and a rigid frame for installing the soft tentacles. The inside of the tentacles is injected with layered glue. One layer is a composite layer of silica gel and fiber, and rubber hose 11 is laid in a continuous U shape in the middle layer of silica gel. The rubber hose is a high-elastic latex tube, and the outer layer is silica gel. Set the length of each tentacle as L, the width as W, and the width of the continuous U-shaped laying of the rubber hose as W 1 , The opening distance of a single U-shape is L 1 , where 1 / 21 / W1 / L1 / W,L 1 The value of / L, under the condition that the air pressure P of the air pump is constant, the bending degree of the tentacle is the same as W 1 / W is proportional to L 1 / L is inversely proportional to W 1 The larger the / W, the wider the U-shaped width of the rubber hose laying, L 1 The smaller the / L, the den...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
| Width w | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More