

Three-degree-of-freedom hip joint mechanism used for metamorphic unmanned ground movement system
A mobile system and hip joint technology, which is applied in the field of unmanned mobile ground mobile system, can solve the problems of low reliability and achieve the effect of improving reliability, compact hip mechanism and avoiding interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
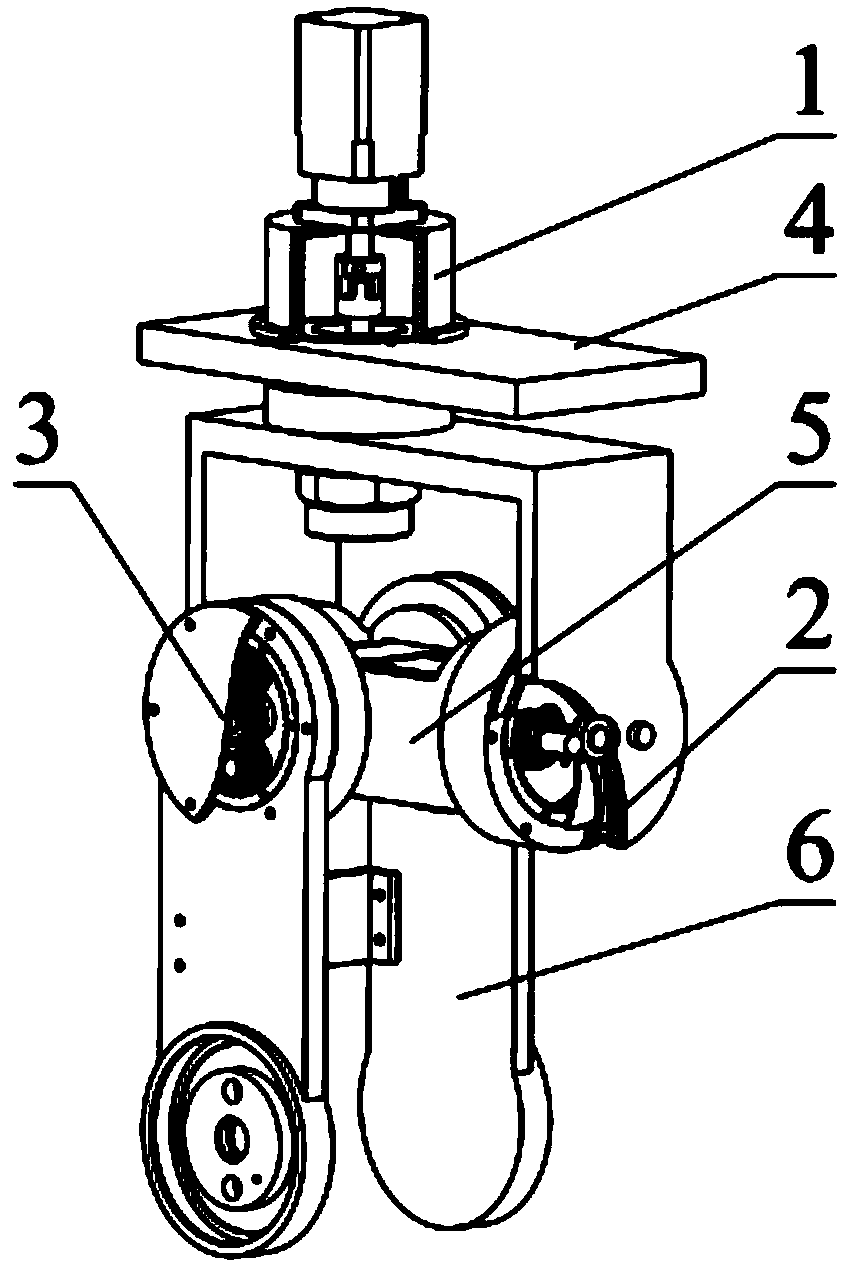
[0043] see figure 1 , a three-degree-of-freedom hip joint mechanism for a variable cell unmanned ground mobile system, the hip joint mechanism is a hip joint connecting piece used to connect the thigh member 6 and the vehicle floor 4 of the vehicle body and is used to drive the The driver component of the hip joint. The hip joint connector includes a T-shaped sleeve 5 and a hip joint plate 13, and the drive member includes a first motor 11, a second motor 21, a third motor 31 and a planetary gear reduction mechanism. The thigh member 6 can be driven by the upper rotation mechanism 1 , the middle rotation mechanism 2 and the lower rotation mechanism 3 along Z, X, and Y directions, respectively.
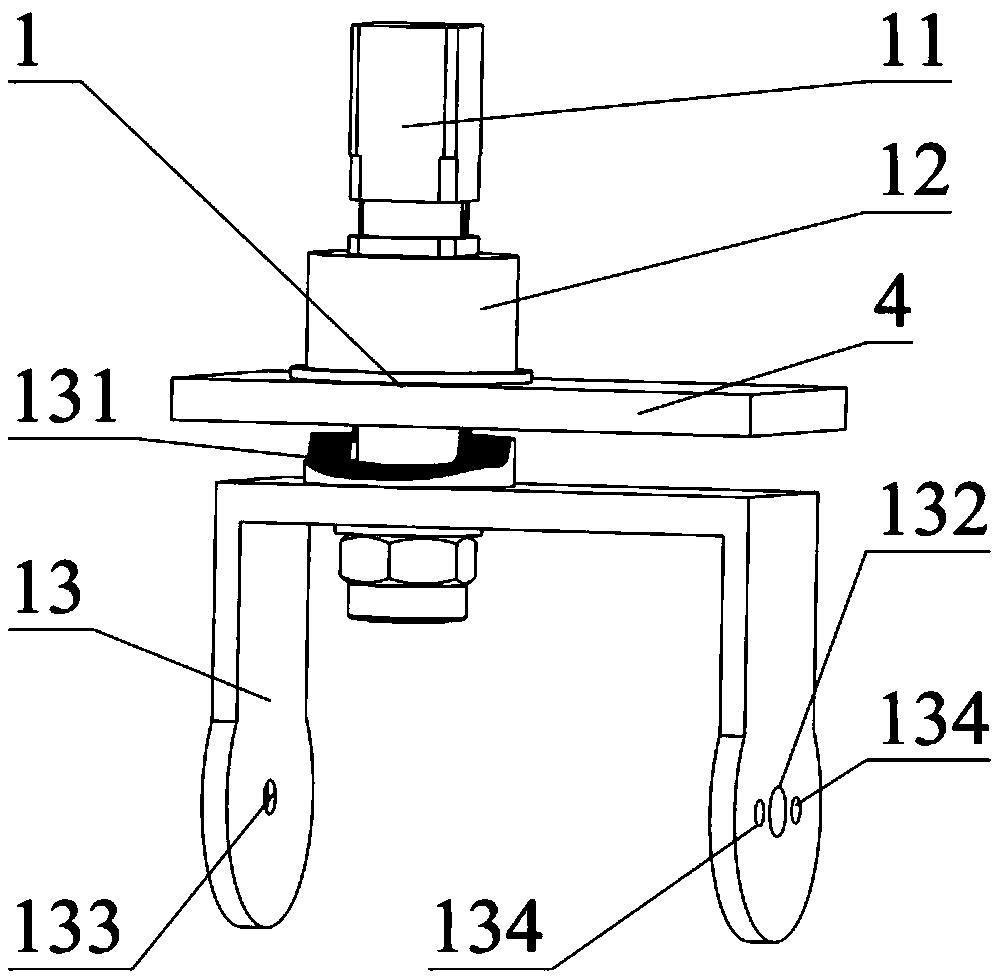
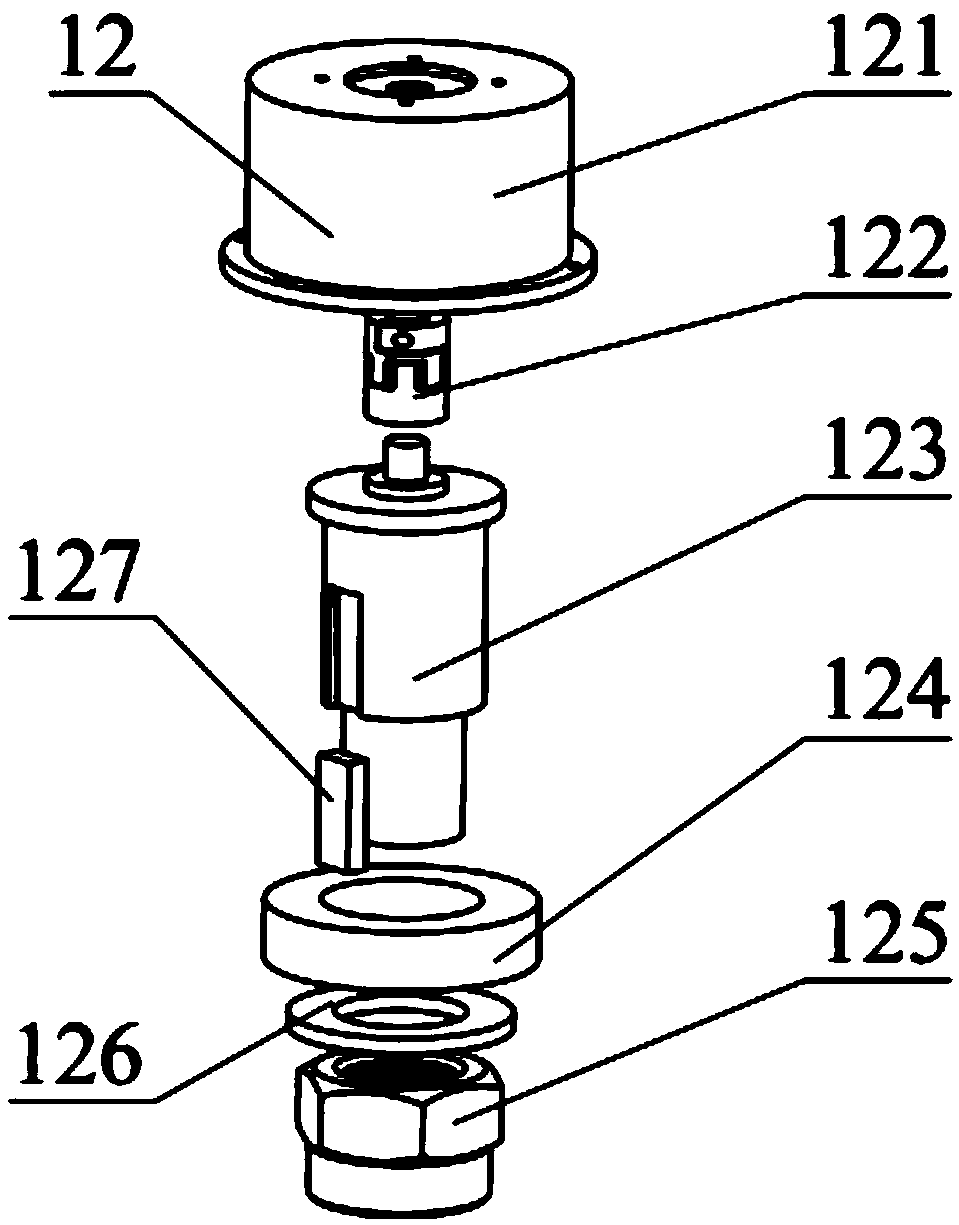
[0044] see Figure 2 ~ Figure 4 , the upper rotation mechanism 1 includes a first motor 11 , a hip joint plate 13 , a vehicle floor plate 4 and a connecting piece 12 . The vehicle floor 4 is fixedly connected to the bottom of the variable cell unmanned ground mobile system, and a ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More