

Vehicle driving lane positioning method based on semantic segmentation
A vehicle driving and positioning method technology, which is applied in the field of computer vision, can solve the problems of no lane segmentation, poor robustness, and high threshold requirements, and achieve convenient and accurate vehicle positioning, low memory requirements, and few training parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
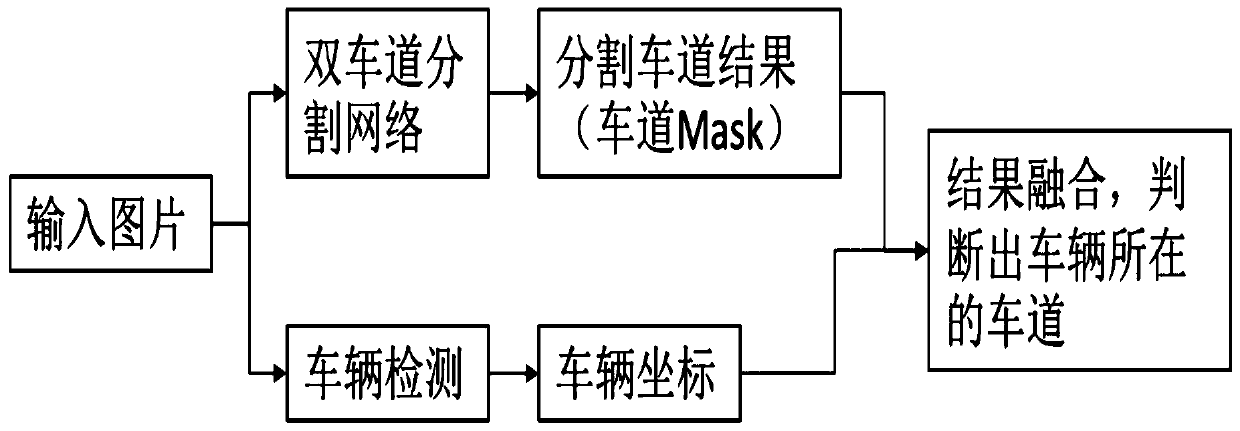
[0033] Such as figure 1 As shown, a vehicle lane location method based on semantic segmentation includes the following steps: Step S1: Acquire road images;
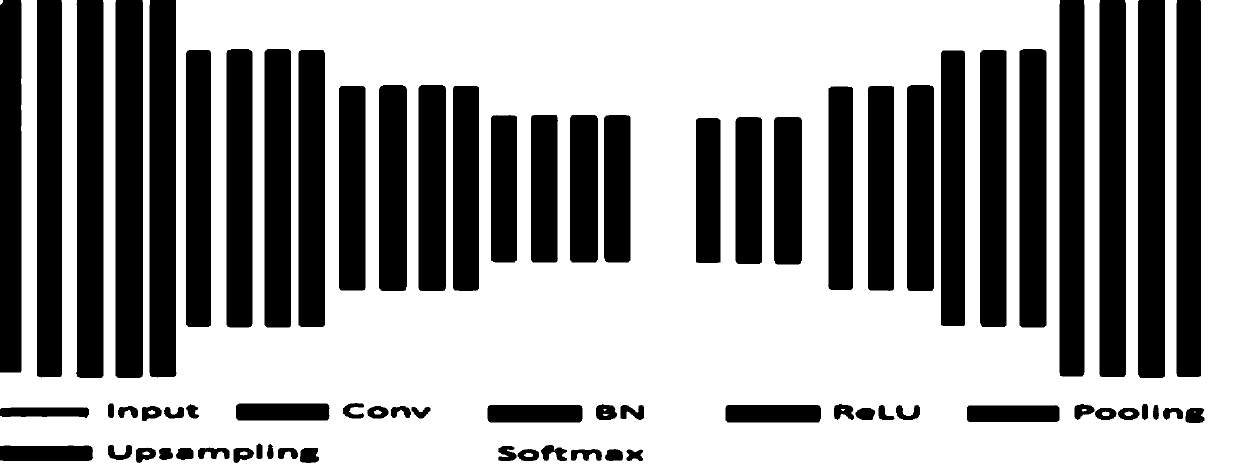
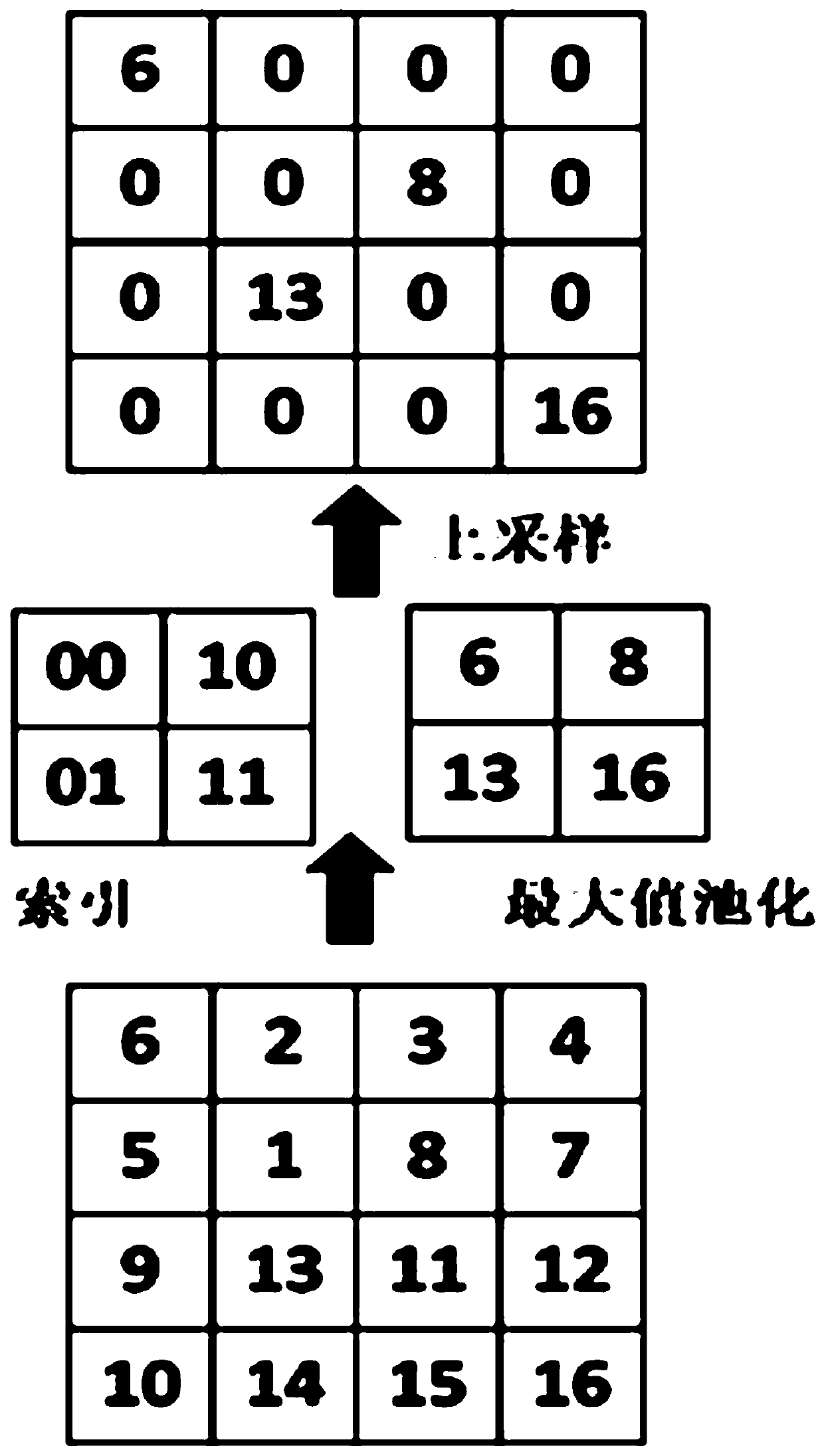
[0034] Step S2: Construct a two-lane semantic segmentation network based on the Segnet network, perform feature extraction on the road image, output the lane segmentation mask map of the road image, and determine whether each pixel on the road image belongs to the left lane, right lane or non-lane;
[0035] Step S3: Carry out target detection on the vehicle in the road image, obtain the location of the vehicle on the road image, and output the coordinates of the vehicle in the road image;
[0036] Step S4: Fusion of the lane segmentation mask map and vehicle target detection results to determine the lane where the vehicle is located.
[0037] In this embodiment, the picture part is first input, w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More