

AGV (Automated Guided Vehicle) route planning method and system based on ant colony algorithm and multi-intelligent agent Q learning
An ant colony algorithm and multi-agent technology, applied in the control/regulation system, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems of dimension disaster, dimension growth, etc., to improve Convergence speed, improving learning speed and convergence speed, optimizing the effect of global search ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. Note that the aspects described below in conjunction with the drawings and specific embodiments are only exemplary, and should not be construed as limiting the protection scope of the present invention.
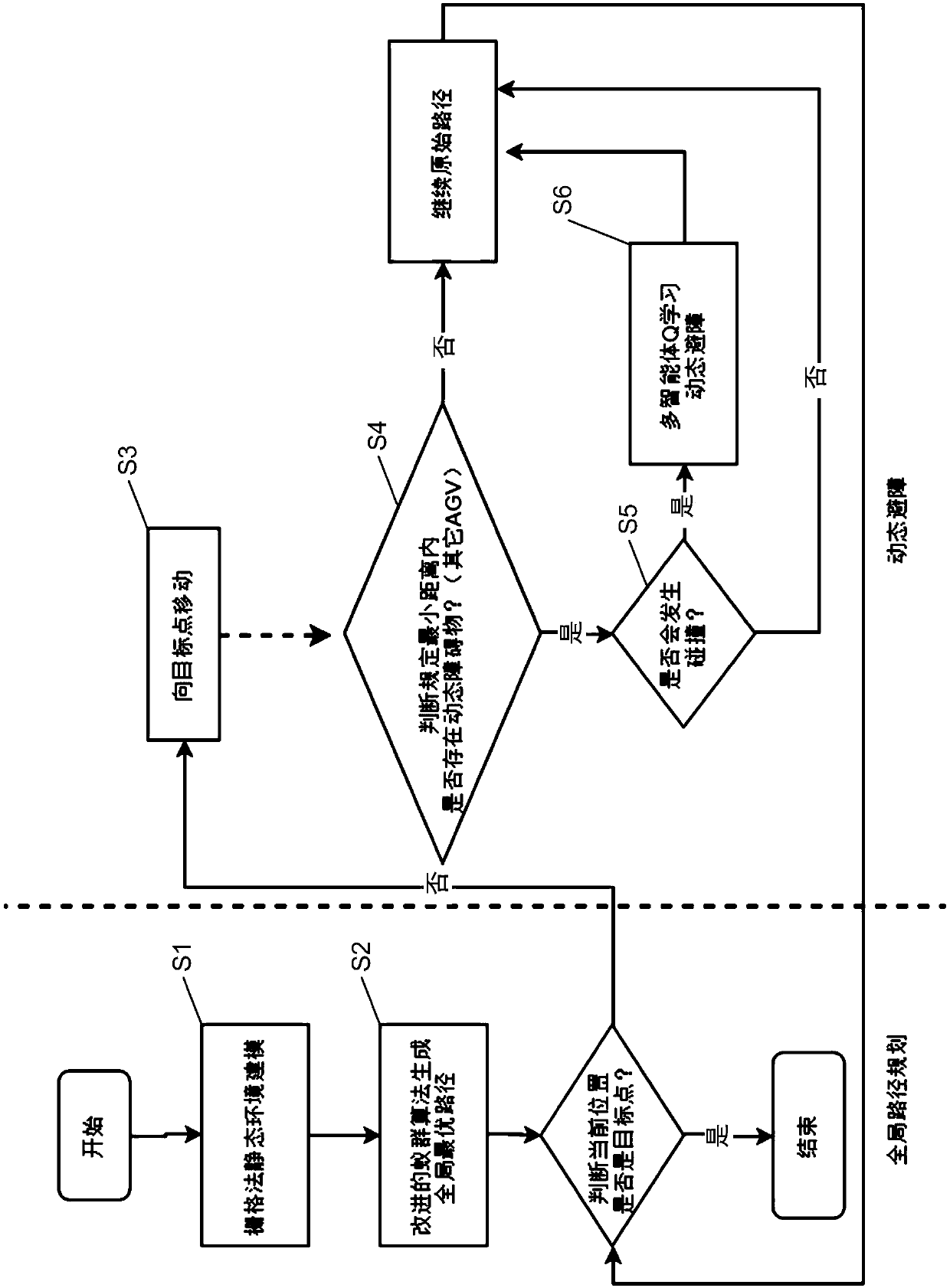
[0058] figure 1 It shows the flow of an embodiment of the AGV path planning method based on ant colony algorithm and multi-agent Q learning of the present invention. See figure 1 , the following is a detailed description of the implementation steps of the AGV path planning method of this embodiment.
[0059] Step S1: Based on the known static environment, use the grid method to model the AGV operation environment on a two-dimensional plane, and initialize the grid information.
[0060] The processing of this step includes corresponding to the two-dimensional coordinates of each small grid, marking the grid where the static obstacle is locat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More