

Foot-type robot single-leg device and foot-type robot
A robot, single-leg technology, applied in the field of robots, can solve problems such as high cost and complex structure, and achieve the effects of low cost, simple structure and high parts reuse rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings, so that those skilled in the art can better understand the present invention. It should be noted that in the following description, when detailed descriptions of known functions and designs may dilute the main content of the present invention, these descriptions will be omitted here.
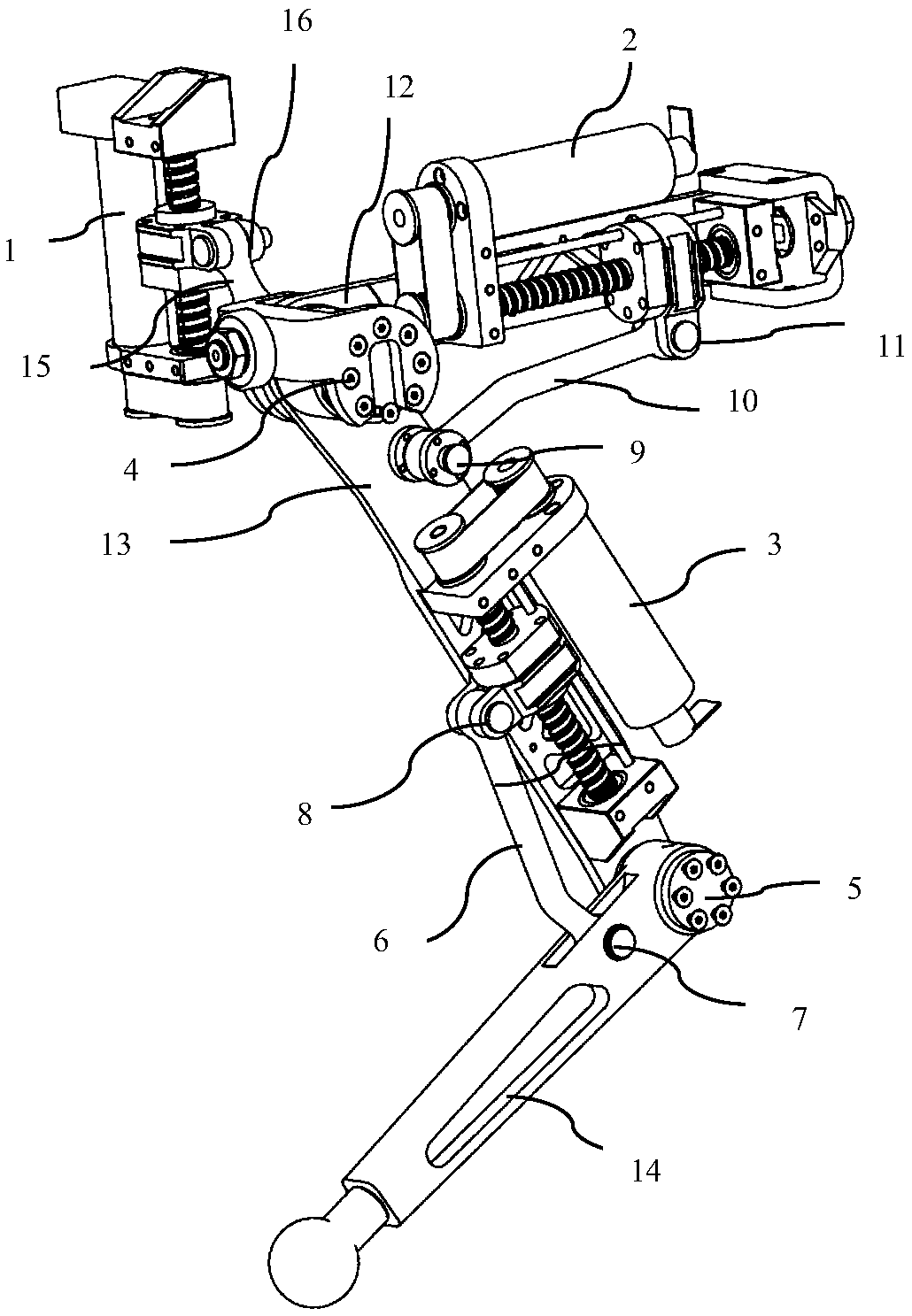
[0027] Such as figure 1 As shown, the present invention provides a legged robot single-leg device, including a hip part 12, a thigh part 13 and a calf part 14; the hip part 12 is connected to the hip drive mechanism 1 through a hip connector and forms a hip joint; The hip part 12 and the thigh part 13 are connected through the first rotation pair 4 to form a hip joint; the thigh part 13 and the lower leg part 14 are connected through the second rotation pair 5 to form a knee joint. Among them, the hip joint is the degree of freedom of rotation around the X axis; the hip jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More