

Efficient visual odometer based on inertial assistance
A visual odometer and inertial-assisted technology, applied in the field of visual navigation, can solve problems such as the inability to realize real-time calculations, and the time-consuming extraction and matching.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0126] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
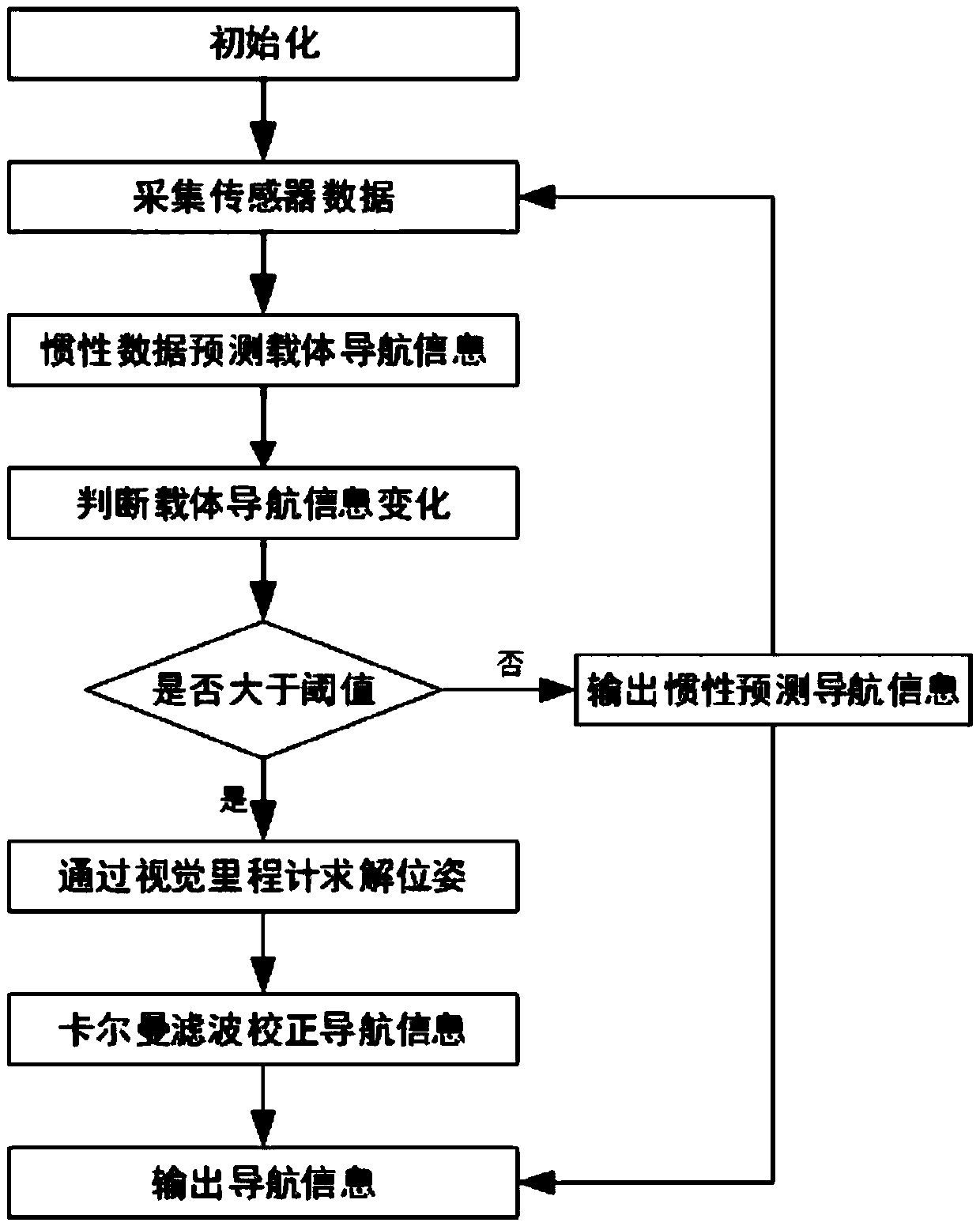
[0127] A high-efficiency visual odometer based on inertial assistance, including a visual sensor and an inertial sensor fixed on a carrier, the inertial sensor includes an accelerometer and a gyroscope, and the visual odometer is fixed on a carrier, refer to figure 1 , the concrete working method of described visual odometer comprises the following steps:
[0128] Step 1: Collect accelerometer information at time k at regular intervals Gyroscope data and visual sensor data S(k);
[0129] At the same time, the system coordinate system is defined: the body coordinate system is constructed with the position of the carrier at the current moment as the origin, and the X-axis, Y-axis and Z-axis coincide with the right direc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More