Method and device for controlling Boolean network robot
A Boolean network and control method technology, which is applied in the field of robot control to meet real-time requirements, speed up computation, and reduce computational complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
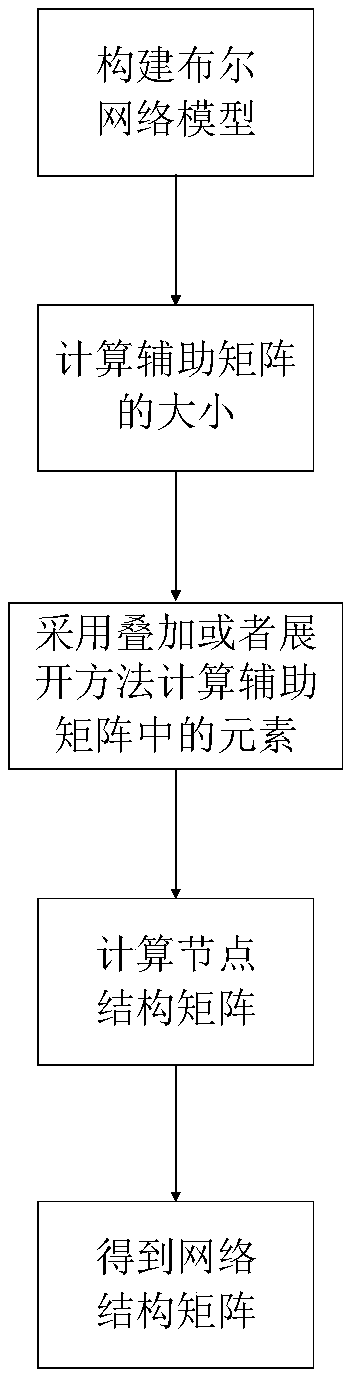
[0059] The invention provides a control device of a Boolean network robot, which includes a processor and a memory, and the processor is used for processing instructions stored in the memory to realize a control method of the Boolean network robot. The control method of the Boolean network robot constructs the Boolean network model of the robot, and then according to the dynamic description of the Boolean network, selects the superposition method or expansion method for each node to obtain the auxiliary matrix E ai , after obtaining the auxiliary matrix E ai After that, the node structure matrix M is obtained by calculation i , and finally use the network structure matrix L and the node structure matrix M i The corresponding relationship...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More