Mechanical arm and table tennis robot with same
A technology of mechanical arms and robots, applied in the field of robotics, can solve problems such as slow movement speed and slow hitting speed, and achieve the effect of increasing movement speed and reducing mass
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
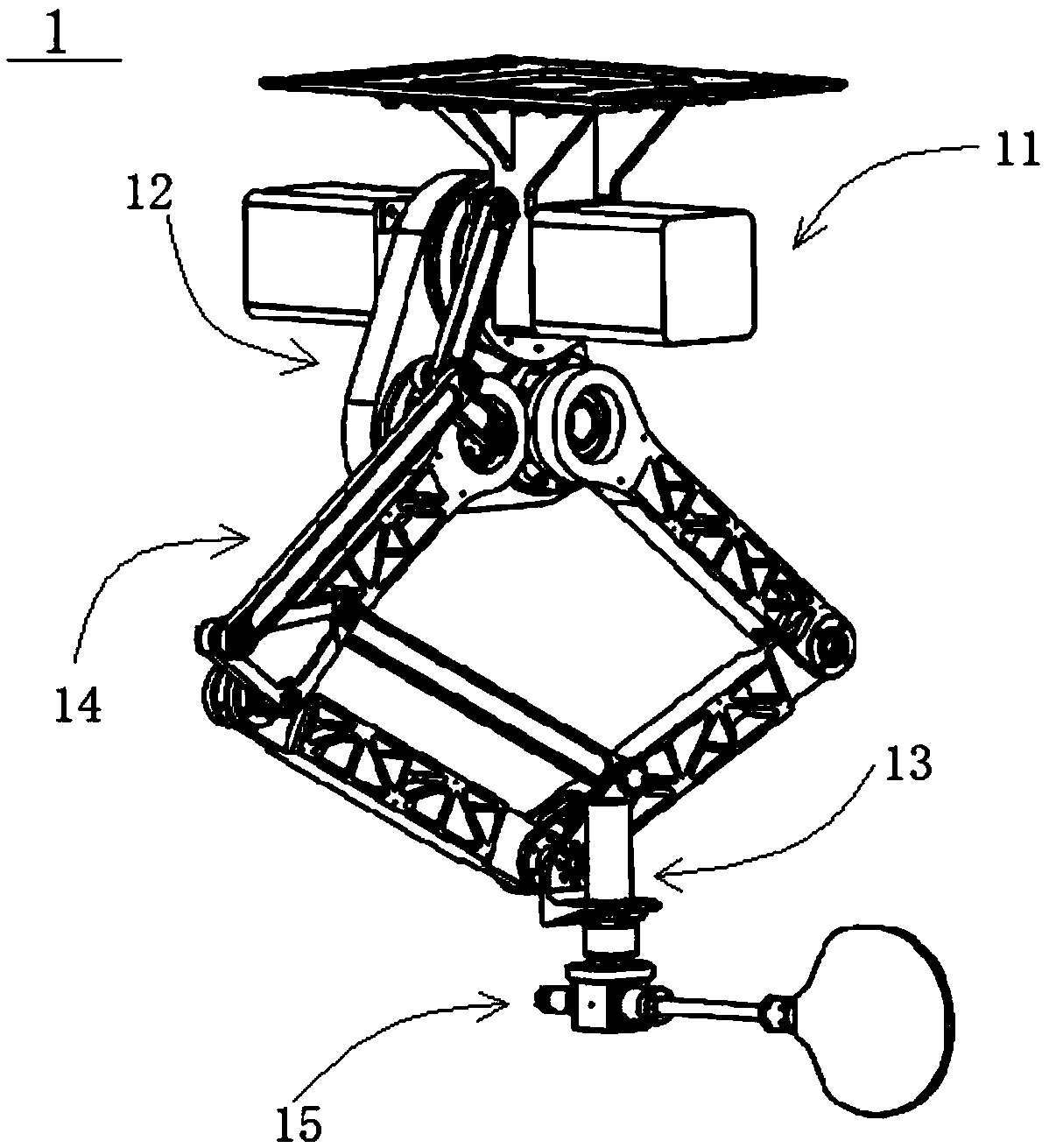
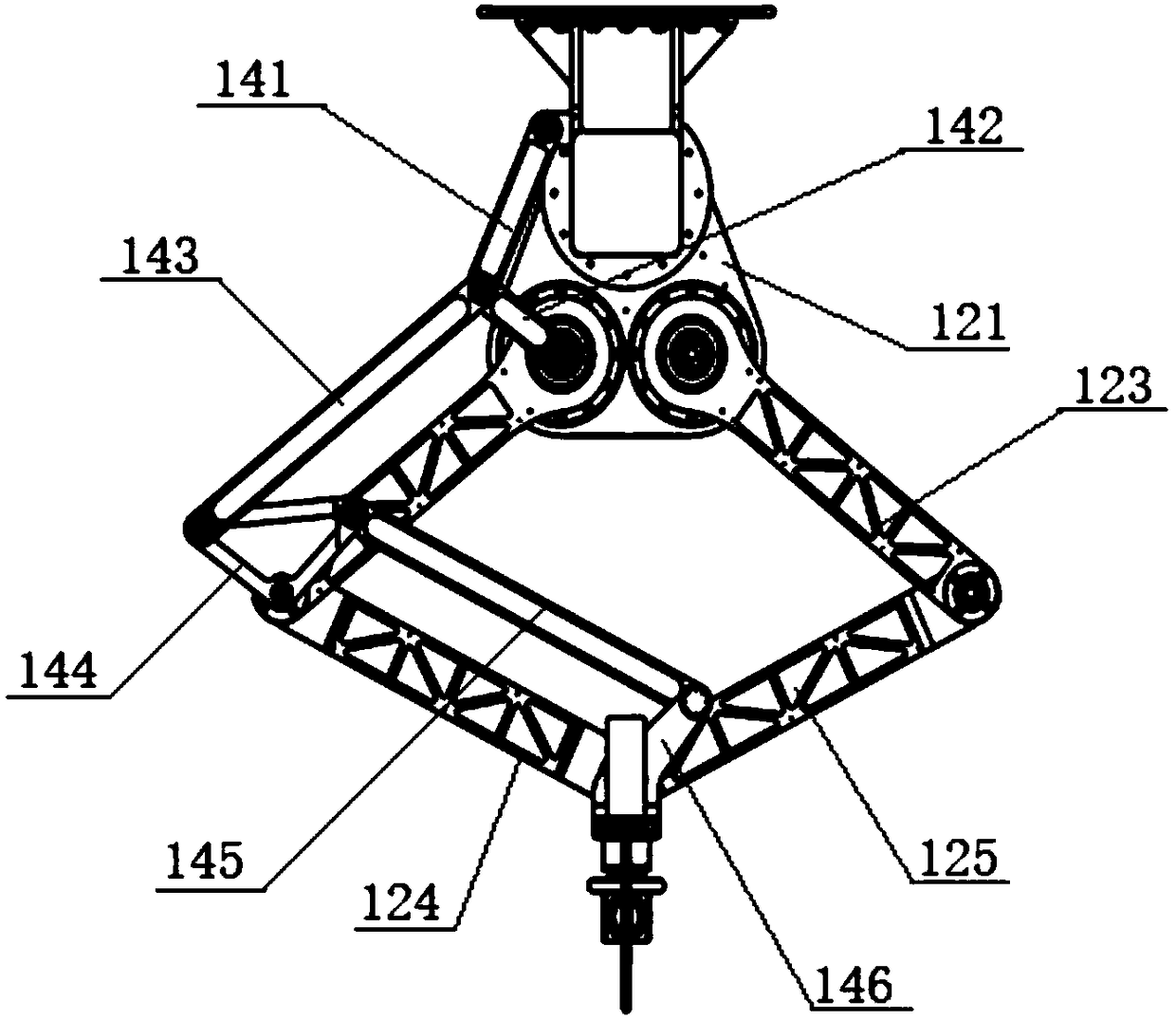
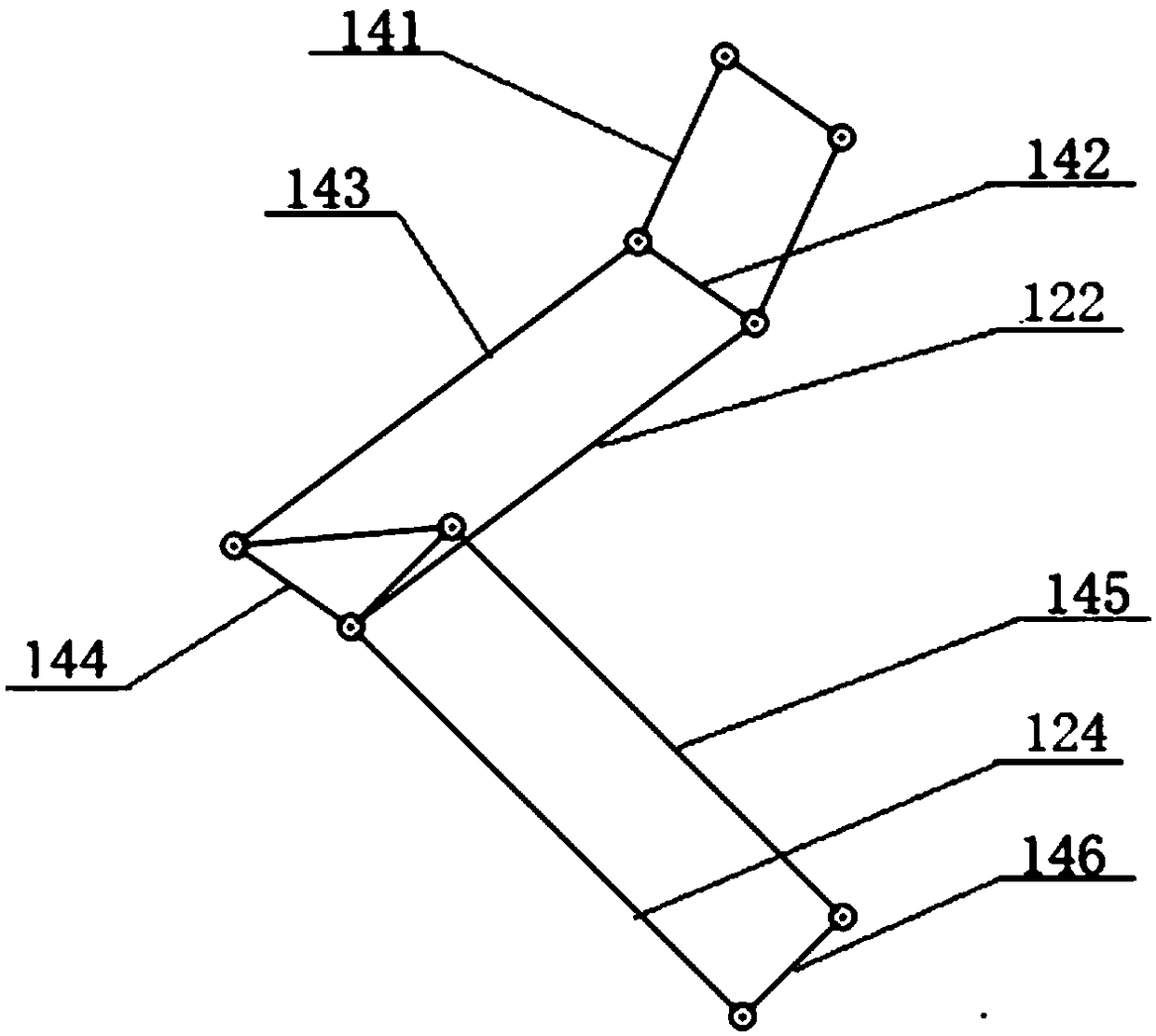
[0065] figure 1 A schematic diagram of the structure of the robotic arm provided by the embodiment of the present invention at a viewing angle, figure 2 For a schematic view of the structure of the robotic arm provided by the embodiment of the present invention at a viewing angle, please refer to figure 1 , 2 As shown, this embodiment provides a mechanical arm, the mechanical arm 1 includes a first driving joint 11, a second driving joint 12, a third driving joint 13, a linkage structure 14, a fourth driving joint 15 and an end effector 16 , the first driving joint 11 is connected to the second driving joint 12, the linkage structure 14 is connected to the first driving joint 11 and the second driving joint 12, and the third driving joint 13 is connected to the The linkage structure 14 is connected, the fourth driving joint 15 is connected with the third driving joint 13, the end effector 16 is connected with the fourth driving joint 15, the first driving joint 11, the th...
Embodiment 2
[0077] Figure 6 It is a schematic diagram of the partial structure of the synchronous movement assembly of the mechanical arm provided by the embodiment of the present invention, Figure 7 For the schematic diagram of the local structure of the synchronous motion assembly of the mechanical arm provided by the embodiment of the present invention, please refer to Figure 6 , 7 As shown, this embodiment has a similar overall structure to Embodiment 1, the difference is that this embodiment provides another structural form of the synchronous drive assembly.
[0078] In this embodiment, the synchronous drive assembly includes a synchronous belt 1218, a fourth synchronous wheel 1219, a fifth synchronous wheel 1220, a second tensioning wheel 1221, a first gear 1222 and a second gear 1223, and the fourth synchronous wheel 1219 is fixed on the output end of the second driving joint 12, the fifth synchronous wheel 1220 is connected to the fourth synchronous wheel 1219 through the syn...
Embodiment 3
[0080] Figure 8 For the structural representation of the state of use of the table tennis robot provided by the embodiment of the present invention, please refer to figure 1 , 8 As shown, the present embodiment provides a table tennis robot, the table tennis robot includes a linear motion module 2 and a mechanical arm 1, the linear motion module 2 includes a linear drive structure and a linear slide rail 21, the mechanical arm 1 is connected with the linear drive structure, and the linear drive structure is used to drive the mechanical arm 1 to move along the linear slide rail 21, wherein, when the table tennis robot is in use, the linear slide rail 21 and the table tennis robot The middle line of the ball table 3 is parallel to the longitudinal direction; the mechanical arm 1 is the mechanical arm described in the first embodiment or the second embodiment, wherein the end effector 16 is a table tennis racket.
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap