

Position and posture estimation method of driverless car based on distance from point to surface and cross correlation entropy rectification
A cross-correlation and distance technology, applied in the field of positioning and navigation in driverless vehicle technology, can solve the problems of low signal-to-noise ratio, low light visibility, strict external environment requirements, etc., to achieve good resistance, robustness and accuracy The effect of pose estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention is described in further detail below in conjunction with accompanying drawing:
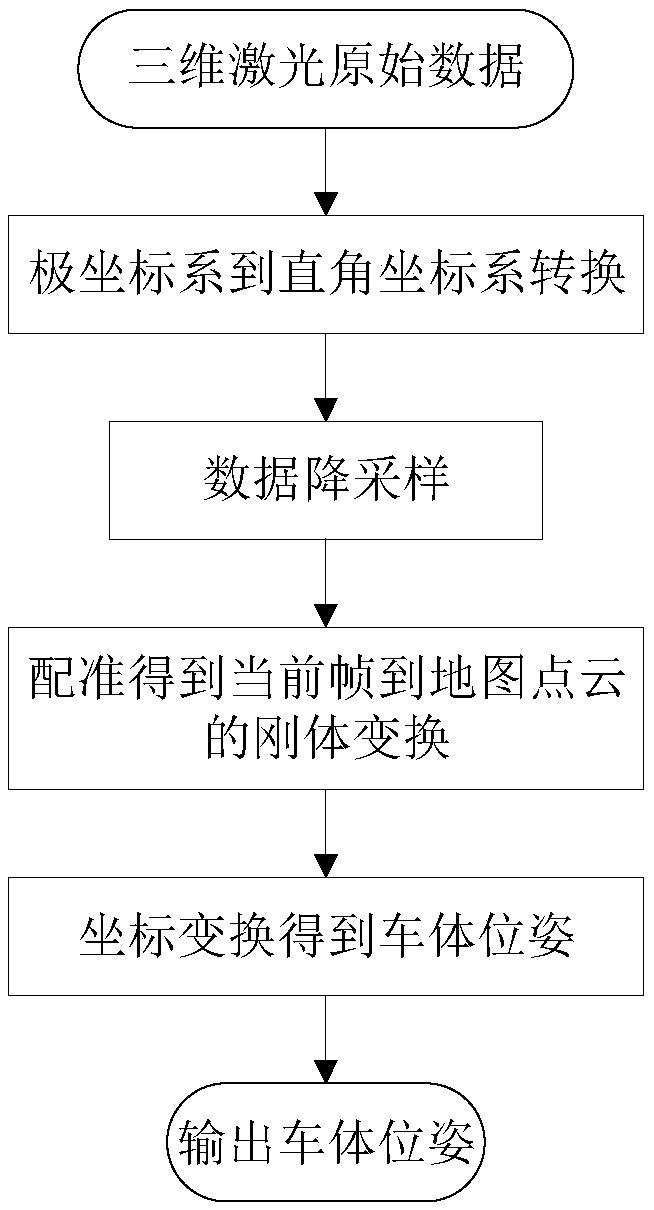
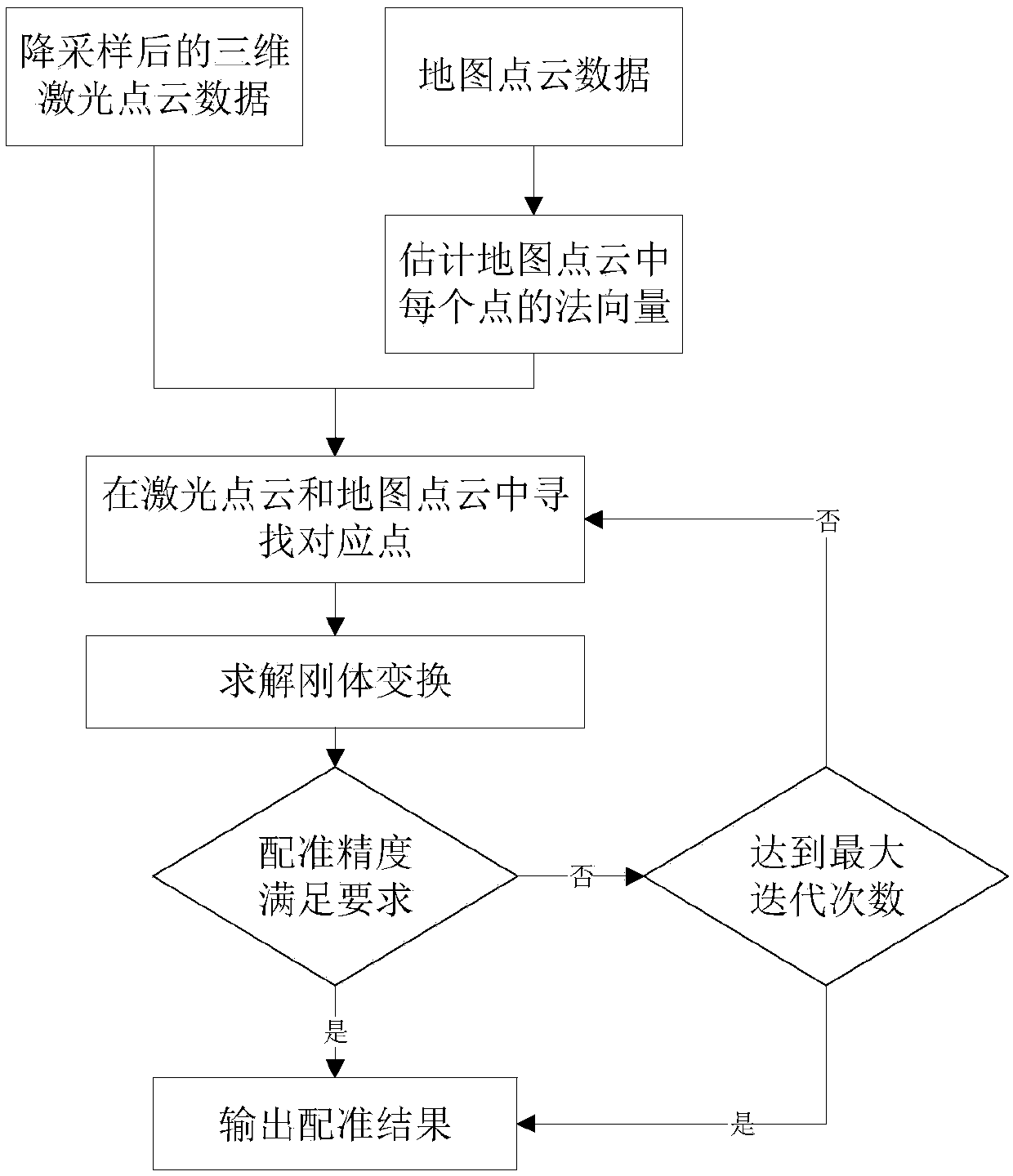
[0039] see Figure 1-3 , the present invention is based on the point-to-surface distance and cross-correlation entropy registration method for unmanned vehicle pose estimation, firstly calibrate the three-dimensional laser radar, and then carry out coordinate conversion on the collected three-dimensional laser radar data; then the down-sampled data and the already For some map data, the point cloud registration is performed to obtain the rotation and translation transformation of the rigid body; and then the position and attitude of the autonomous moving body are obtained according to the rotation and translation transformation. The present invention specifically carries out according to the following steps:
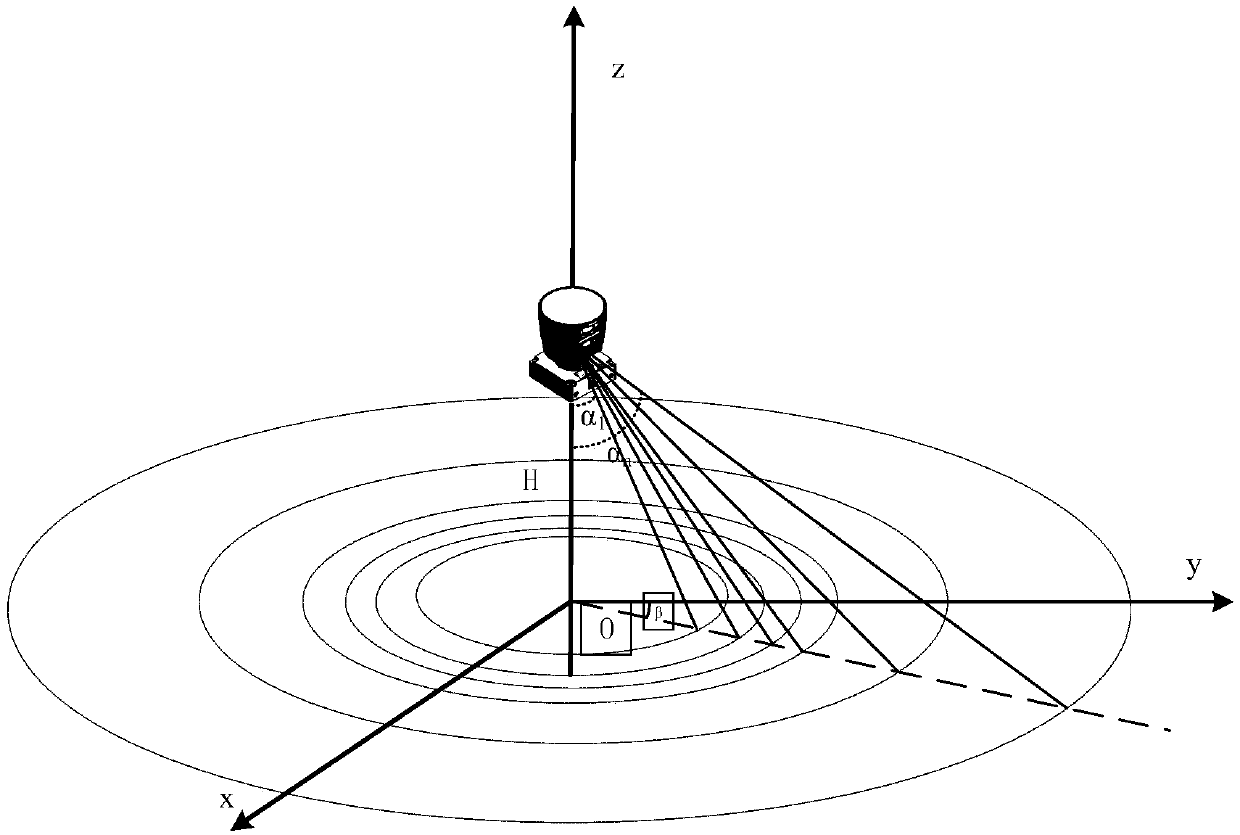
[0040] Step 1) In order to complete the calculation and description of the position and attitude of the unmanned vehicle, first determine the installation heigh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More