

UAV autonomous landing control system and method for mobile platform
A control system, autonomous landing technology, applied in the direction of control/regulation system, non-electric variable control, altitude or depth control, etc., can solve the problem that the UAV sensor cannot obtain a sufficiently accurate GPS signal, is controlled by human factors, and fails to land. and other problems, to achieve the effect of high degree of automation, reduction of accident rate, and improvement of safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The technical solutions of the present invention will be described in detail below in conjunction with the examples, but the scope of protection is not limited thereto.
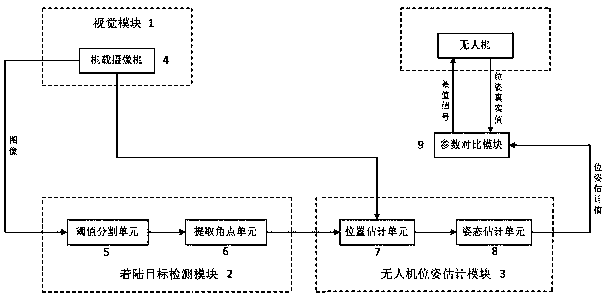
[0057] Such as figure 1 As shown, the present invention provides a mobile platform-oriented UAV autonomous landing control system, including a vision module 1, a landing target detection module 2, a UAV pose estimation module 3 and a parameter comparison module 9.
[0058] Among them, the vision module 1 is used to acquire the image of the landing target. The vision module 1 includes an airborne camera 4, which is fixed at the bottom of the drone and shoots vertically downwards.
[0059] The landing target detection module 2 is used to perform image processing on the current frame image in real time, and transmit the processing result to the UAV pose estimation module 3 . The landing target detection module 2 includes a threshold segmentation unit 5 and a corner extraction unit 6 . The threshold seg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More