

Unmanned aerial vehicle landing method and device
A UAV, current position technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control and other directions, which can solve the problems of large landing error and difficult landing accurately.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
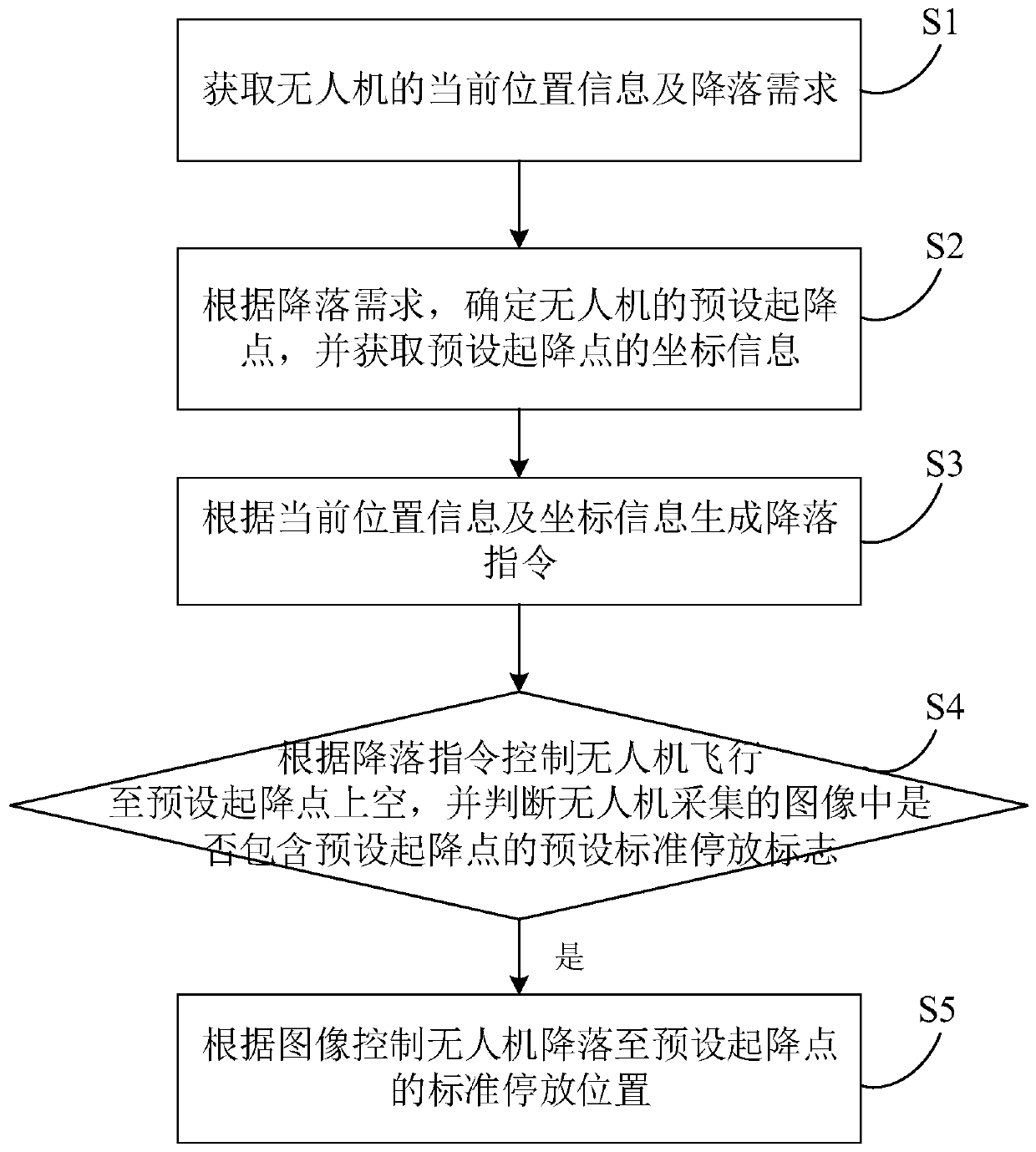
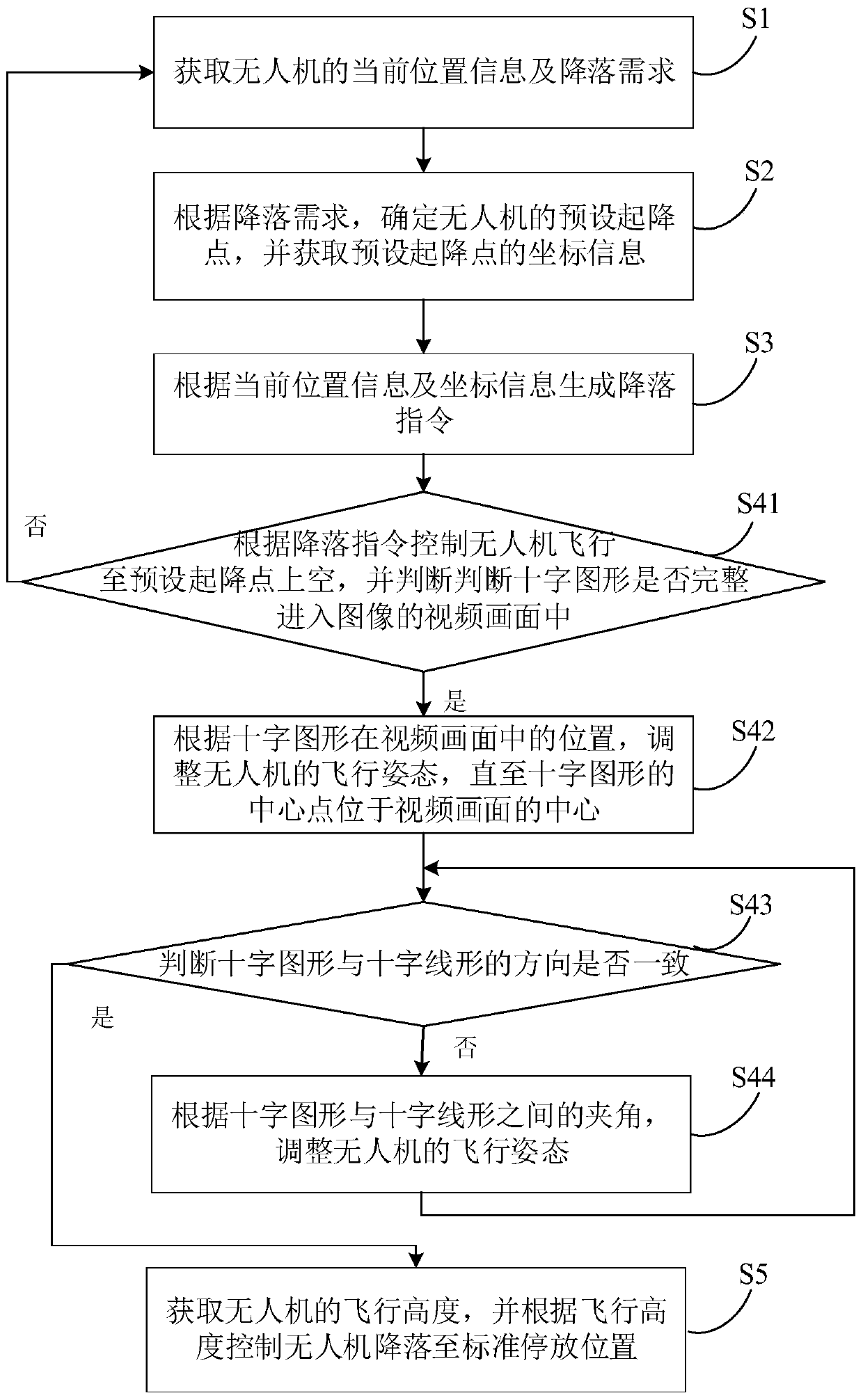
[0023] The embodiment of the present invention provides a drone landing method, such as figure 1 As shown, the landing method of the aircraft includes:
[0024] Step S1: Obtain the current position information and landing requirements of the drone. Specifically, the landing requirement includes information such as the target landing area of the drone or the target parking airport.
[0025] Step S2: Determine the preset take-off and landing point of the drone according to the landing demand, and obtain the coordinate information of the preset take-off and landing point. In practical applications, there may be multiple preset take-off and landing points at the landing position of the UAV. Therefore, it is necessary to determine the preset take-off and landing point for parking the UAV according to the landing demand of the UAV, and obtain the pre-determined landing point. Set the coordinate information of the landing point to provide coordinate information for the landing of the d...
Embodiment 2
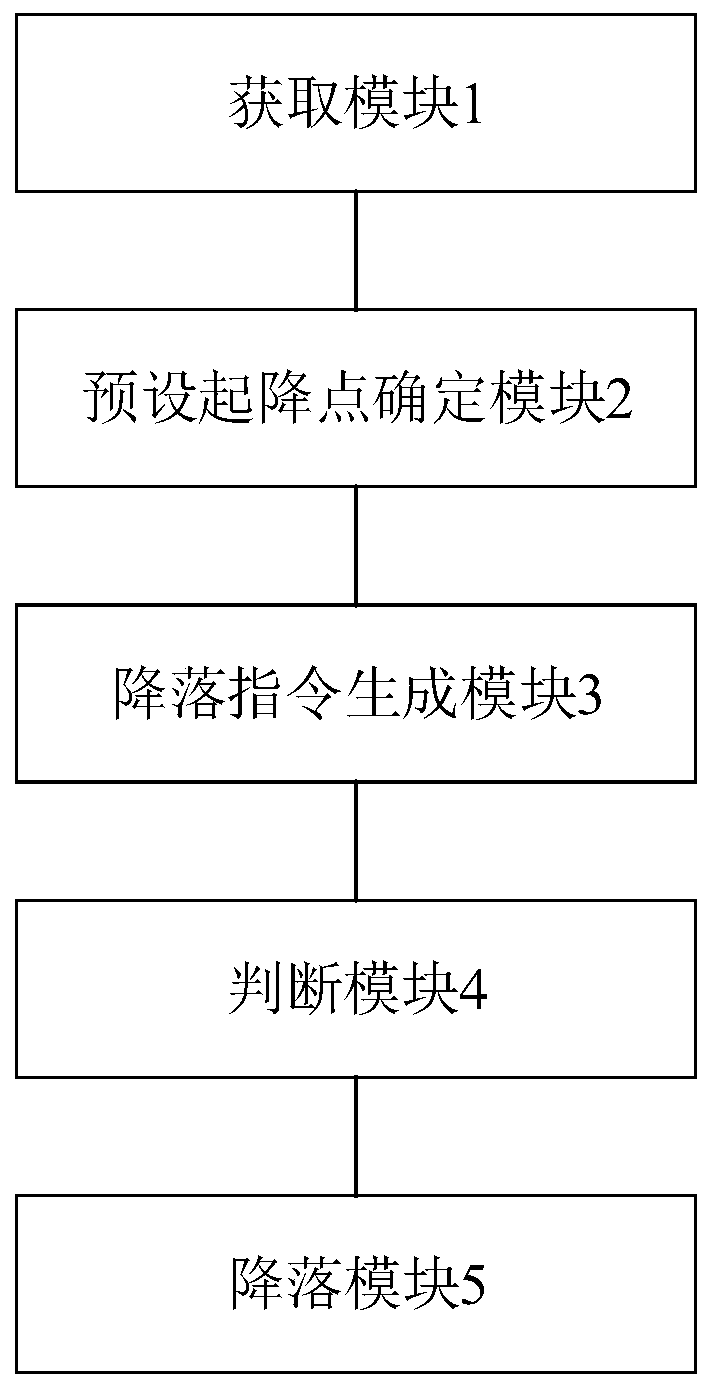
[0043] The embodiment of the present invention provides a drone landing device, such as image 3 As shown, the drone landing device includes:
[0044] The acquisition module 1 is used to acquire the current position information and landing requirements of the drone. For details, refer to the related description of step S1 in Embodiment 1.
[0045] The preset take-off and landing point determination module 2 is used to determine the preset take-off and landing point of the UAV according to the landing demand, and obtain the coordinate information of the preset take-off and landing point. For details, refer to the related description of step S2 in Embodiment 1.
[0046] The landing instruction generating module 3 is used for generating landing instructions according to the current position information and coordinate information. For details, refer to the related description of step S3 in Embodiment 1.
[0047] The judging module 4 is used for controlling the drone to fly above the pre...
Embodiment 3
[0051] The embodiment of the present invention provides a non-transitory computer storage medium, the computer storage medium stores computer-executable instructions, and the computer-executable instructions can execute the drone landing method in any of the foregoing method embodiments, wherein the foregoing storage medium Can be magnetic disk, optical disk, read-only memory (Read-Only Memory, ROM), random access memory (RAM), flash memory (Flash Memory), hard disk (Hard Disk Drive, abbreviation: HDD) ) Or a solid-state drive (Solid-State Drive, SSD), etc.; the storage medium may also include a combination of the foregoing types of memories.
[0052] Those skilled in the art can understand that all or part of the processes in the above-mentioned embodiment methods can be implemented by instructing relevant hardware through a computer program. The program can be stored in a computer readable storage medium. At this time, it may include the procedures of the above-mentioned method...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More