

Path planning method for autonomous vehicle
A path planning and automatic driving technology, which is applied in vehicle position/route/height control, motor vehicles, non-electric variable control, etc., can solve problems such as ignoring vehicle attitude information, simple functions of unmanned vehicles, and effective vehicle control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
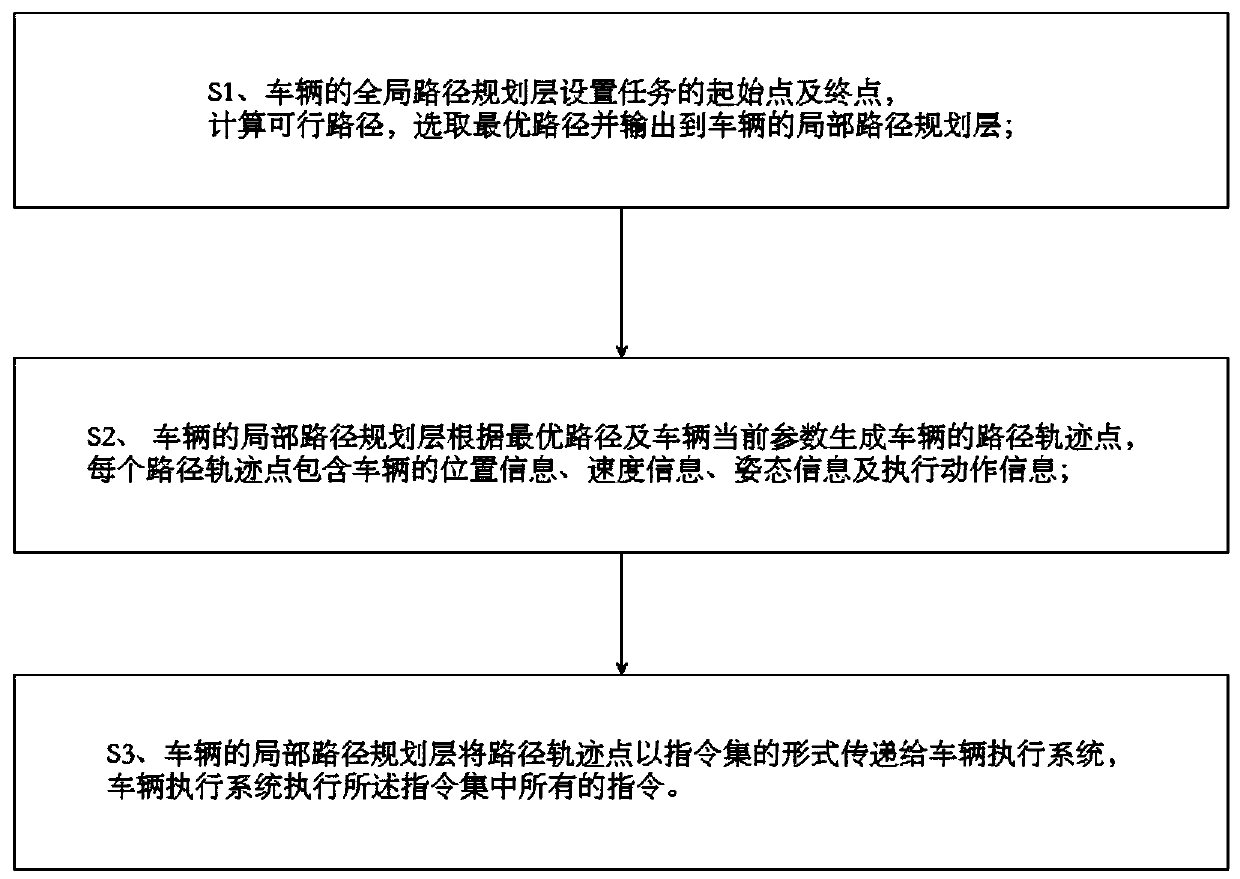
[0030] refer to figure 1 , figure 2 or image 3 , a method for path planning of an autonomous vehicle provided in this embodiment, the method includes the following steps:
[0031] S1. The global path planning layer of the vehicle sets the starting point and the end point of the task, calculates the feasible path, selects the optimal path and outputs it to the local path planning layer of the vehicle;
[0032] S2. The local path planning layer of the vehicle generates the path track points of the vehicle according to the optimal path and the current parameters of the vehicle, and each of the path track points includes the position information, speed information, attitude information and Execution action information;
[0033] S3. The local path planning layer of the vehicle transmits the path track points in the form of an instruction set to the vehicle execution system, and the vehicle execution system executes all the instructions in the instruction set.
[0034] In the ...
Embodiment 2
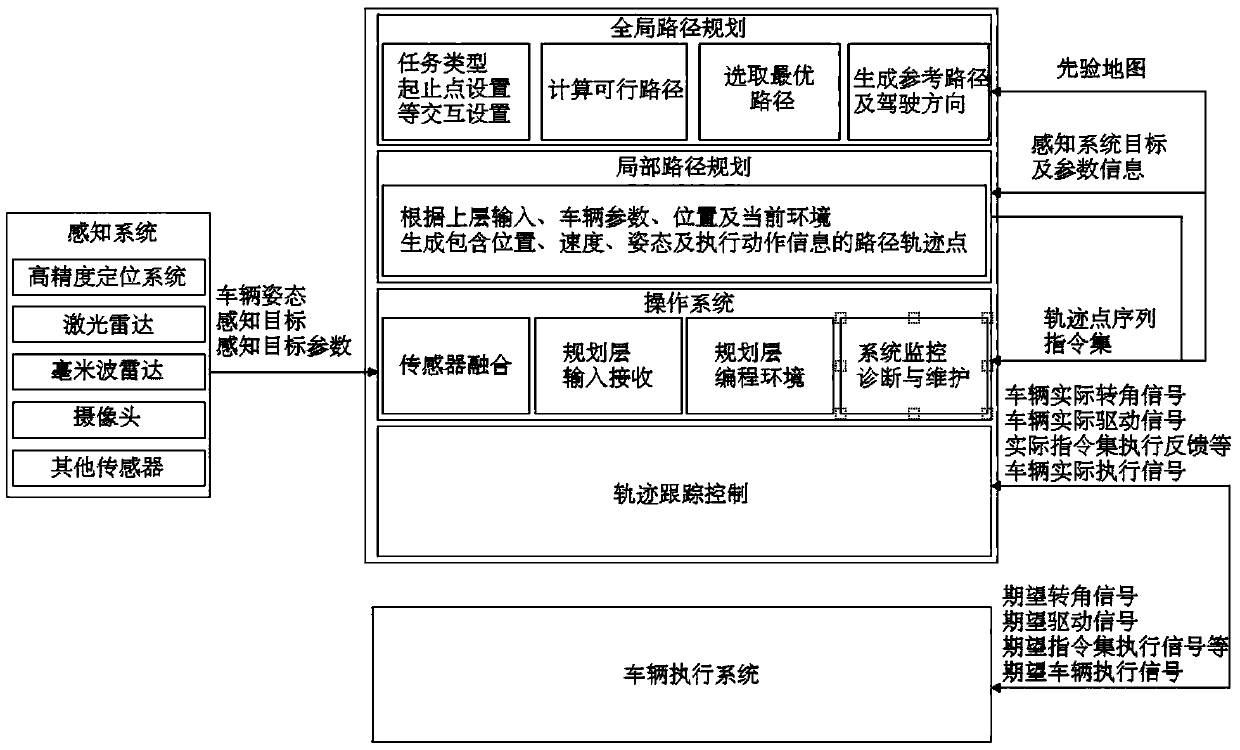
[0038] see figure 1 or figure 2 , the path planning method of the self-driving vehicle provided by the embodiment of the present invention, the local path planning layer of the vehicle packs and converts the information of the generated path track points into the form of an instruction set, and the support of the instruction set is the result of the joint action of hardware and software. The position information, speed information, attitude information and action information to be executed in the command set need to be combined by adjusting the hardware and software of the vehicle controller, and then transmitted to the vehicle execution system through the CAN bus and the intelligent gateway.
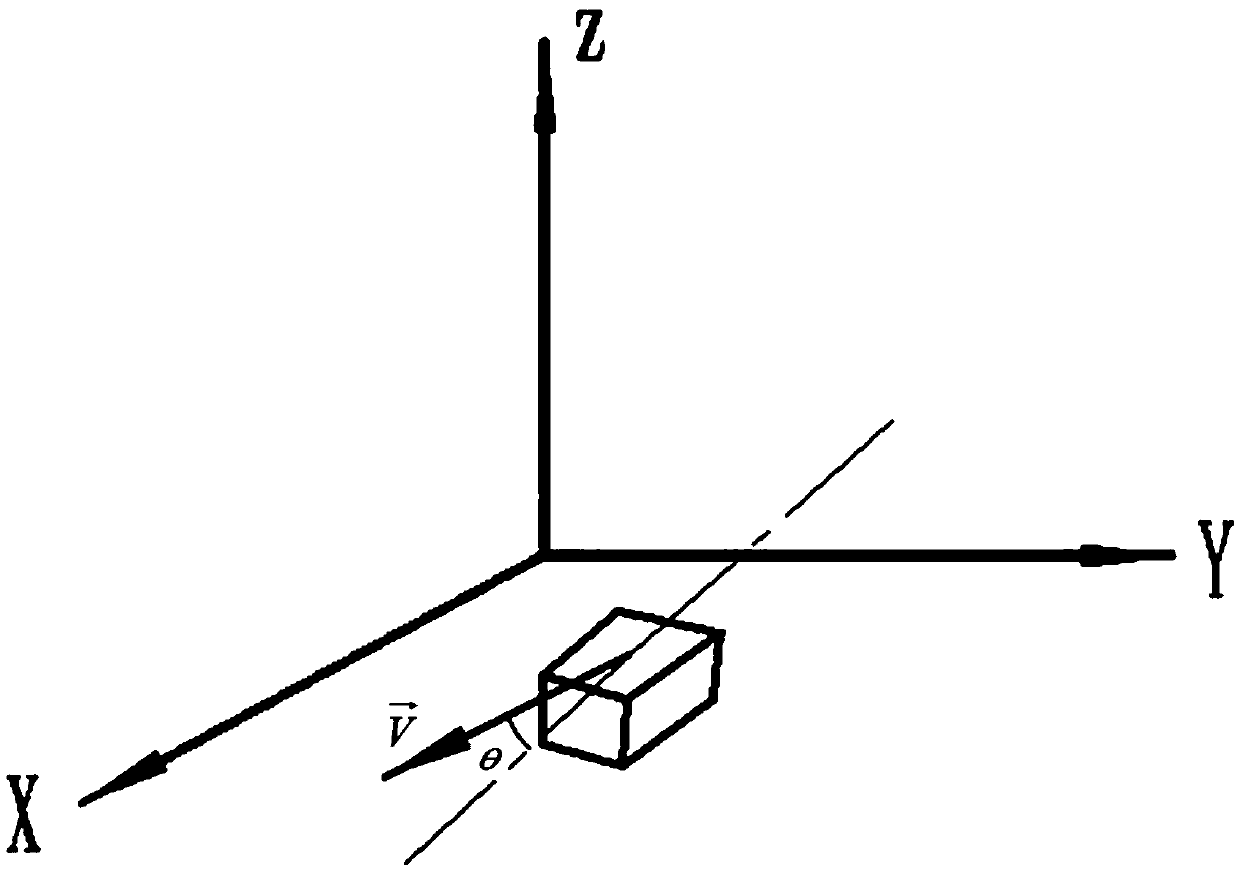
[0039]The vehicle execution system includes N actuators, and the instruction set containing path planning point information is composed of four N-dimensional vectors set in the Cartesian three-dimensional coordinate system The N×4 matrix composed of is denoted as in,
[0040] N-...
Embodiment 3
[0046] see figure 1 or figure 2 , the embodiment of the present invention provides a path planning method for an autonomous vehicle, when it is necessary for the vehicle to transport the items in the vehicle to a designated location and deliver them to a specific object. The actions that need to be completed are:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More