

A shortest annular path navigation method for an automated guided vehicle and the guided vehicle
A technology for automatic guidance and transport vehicles, applied in road network navigators, navigation, surveying and mapping and navigation, etc., can solve problems such as accumulated errors, difficulty in optimizing paths, and difficulty in avoiding obstacles, so as to simplify the difficulty and improve the efficiency of path planning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings.
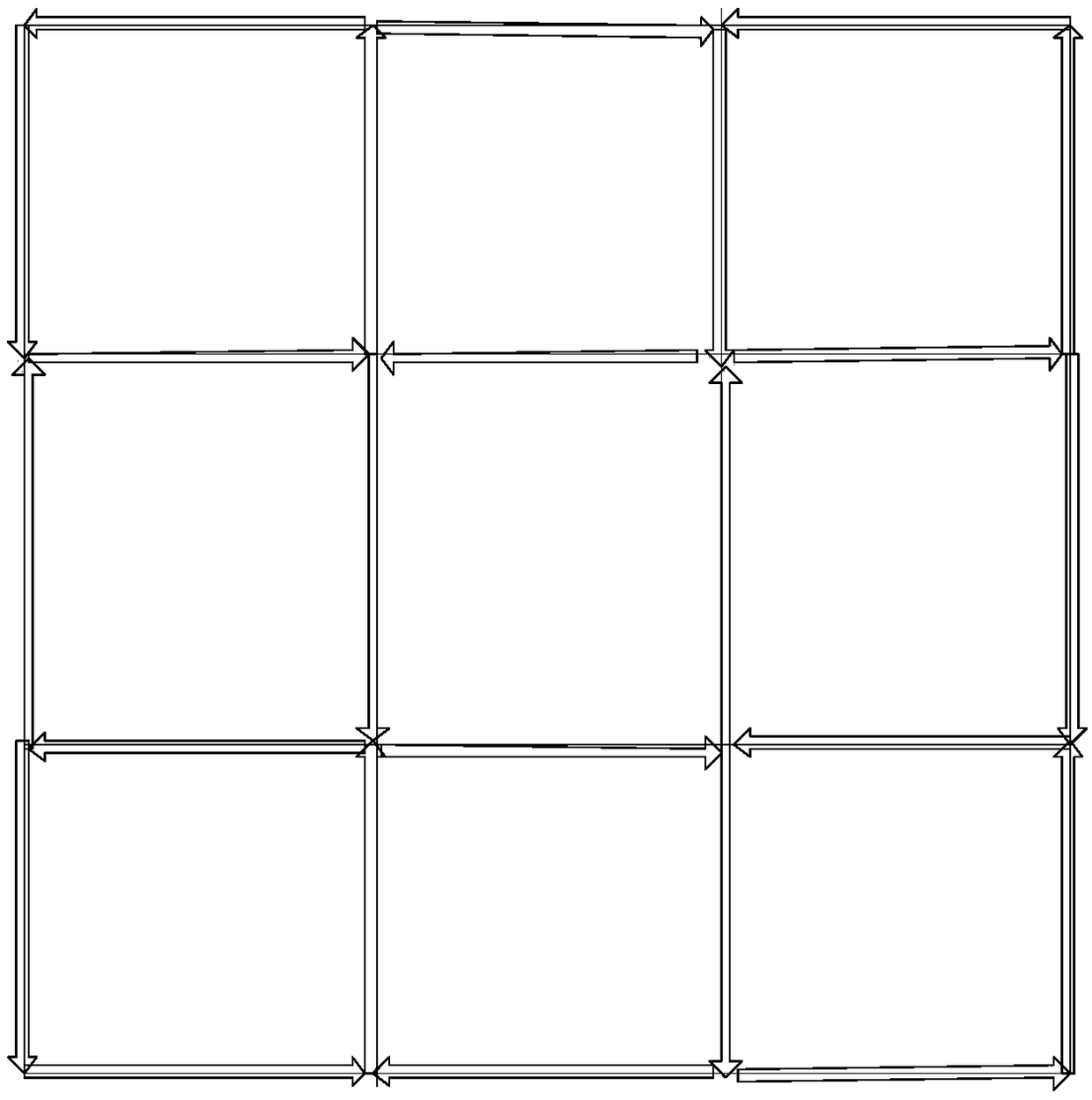
[0020] Such as figure 1 As shown, a method for navigating the shortest circular path of an automatic guided transport vehicle and guiding the transport vehicle includes the following steps:
[0021] Step 1, according to the node coordinate information and node relationship information in the workplace, generate an adjacency matrix diagram containing the actual information of the workplace road section, such as figure 1 shown;
[0022] Step 2: Find the shortest one-way circular path required by the task in the adjacency matrix graph through Dijkstra's algorithm.
[0023] Dijkstra's algorithm is currently recognized as one of the most suitable algorithms for solving the shortest path search between two points in a non-negative weight graph. Call Dijkstra's algorithm multiple times to solve the shortest path ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More