A Coordinated Control Method for the Approach Process of Compound Wing UAV
A coordinated control and unmanned aerial vehicle technology, applied in the direction of attitude control, control/adjustment system, non-electric variable control, etc., can solve the problems of structural damage at the root of the wing, the influence of the fixed wing, and the limited deceleration effect of the fixed wing, etc., to reduce the The effect of fluctuating attitude angle, reducing the risk of damage, and improving flight reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to have a clearer understanding of the technical features, purposes and effects of the patent of the present invention, the specific implementation of the patent of the present invention will now be described in detail with reference to the accompanying drawings.
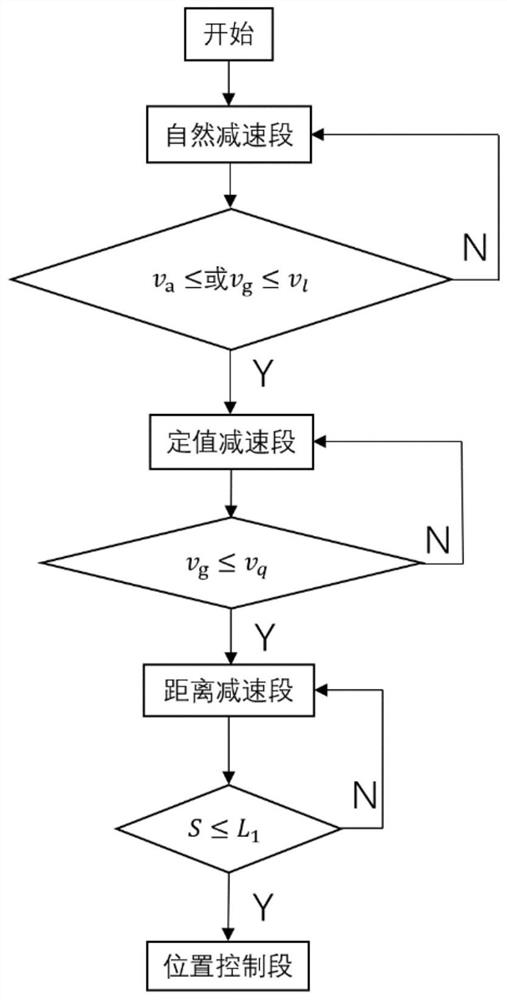
[0028] Such as figure 1 As shown, when the UAV just enters the approach segment, it first enters the natural deceleration segment until the airspeed v a , ground speed v g At the same time not greater than the stall airspeed v l Then enter the dynamic deceleration section, when the airspeed v a , ground speed v g At the same time not greater than the stall airspeed v l Then exit the dynamic deceleration section and enter the distance deceleration section until the horizontal projected distance from the aircraft to the target waypoint is not greater than the fixed distance criterion L 1 , exit the distance control segment and enter the position control segment.
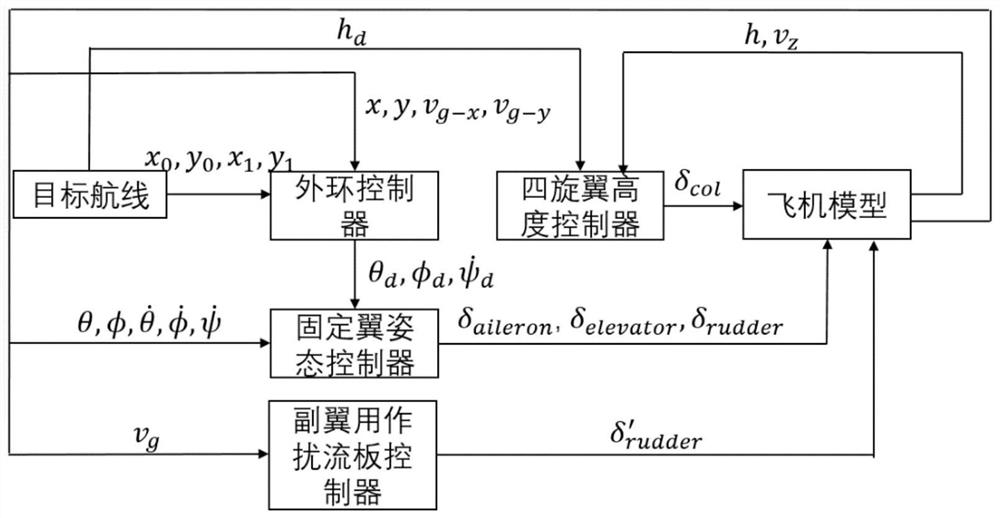
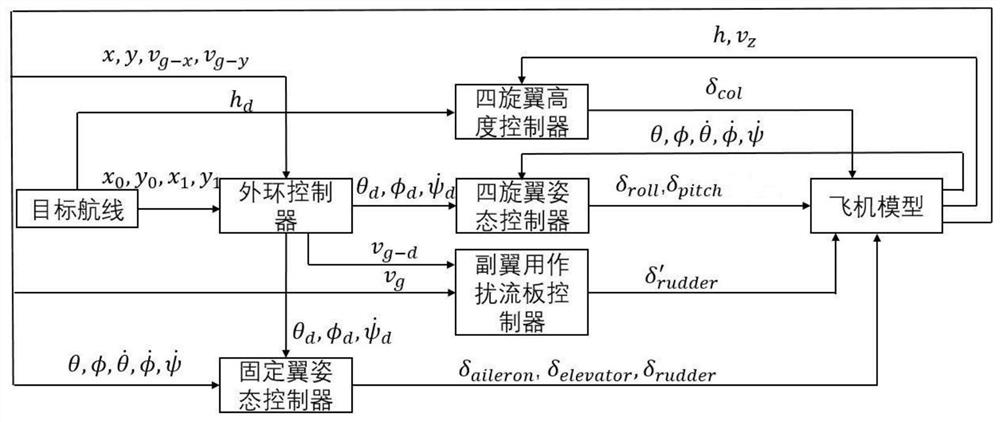
[0029] Such as figure 2 The na...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com