

Drone route planning method in mountainous area with flight safety degree being restrained
A technology of flight safety and path planning, applied in the field of drones, can solve the problems of high risk of path, slow calculation speed, and inability to accurately judge the degree of path safety, so as to improve calculation rate, intuitive safety, and reduce complexity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention clearer, the following examples are given to further describe the present invention in detail.
[0030] A method for path planning of unmanned aerial vehicles with flight safety constraints in mountainous areas, comprising the following steps:
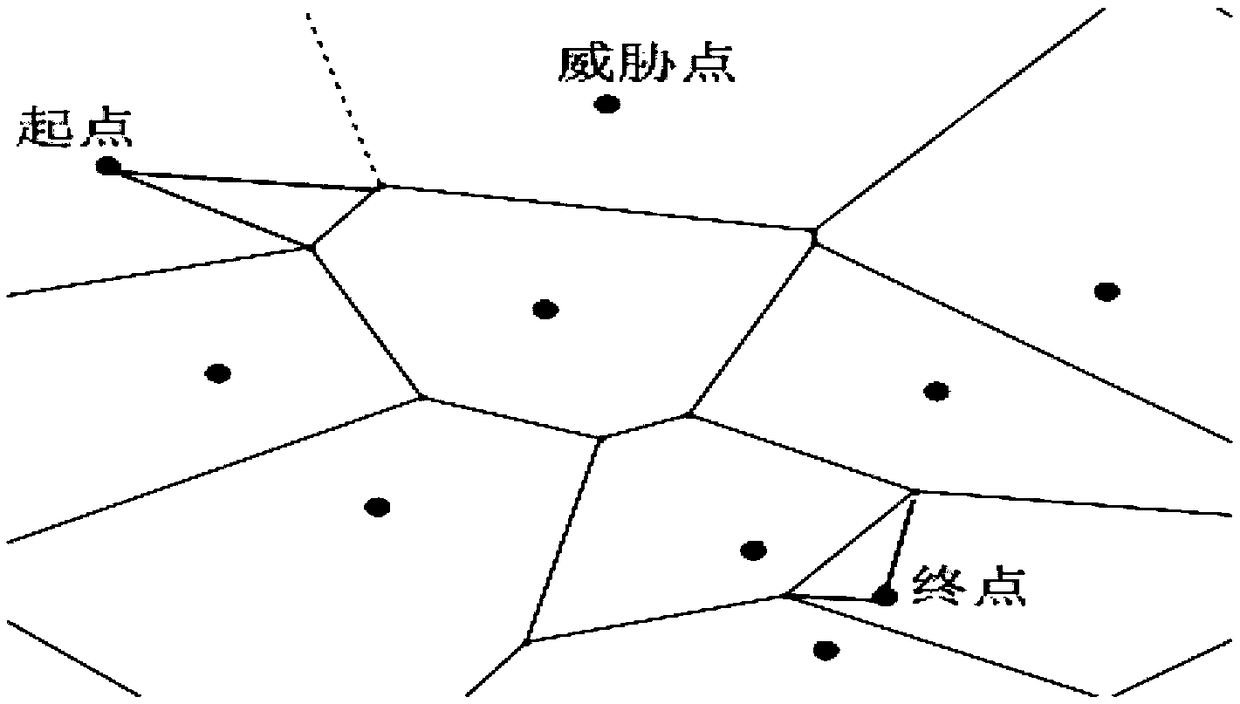
[0031] Step 1, combine the starting point, target point and obstacle location to establish a Voronoi diagram to form the initial solution of the path, such as figure 1 ;
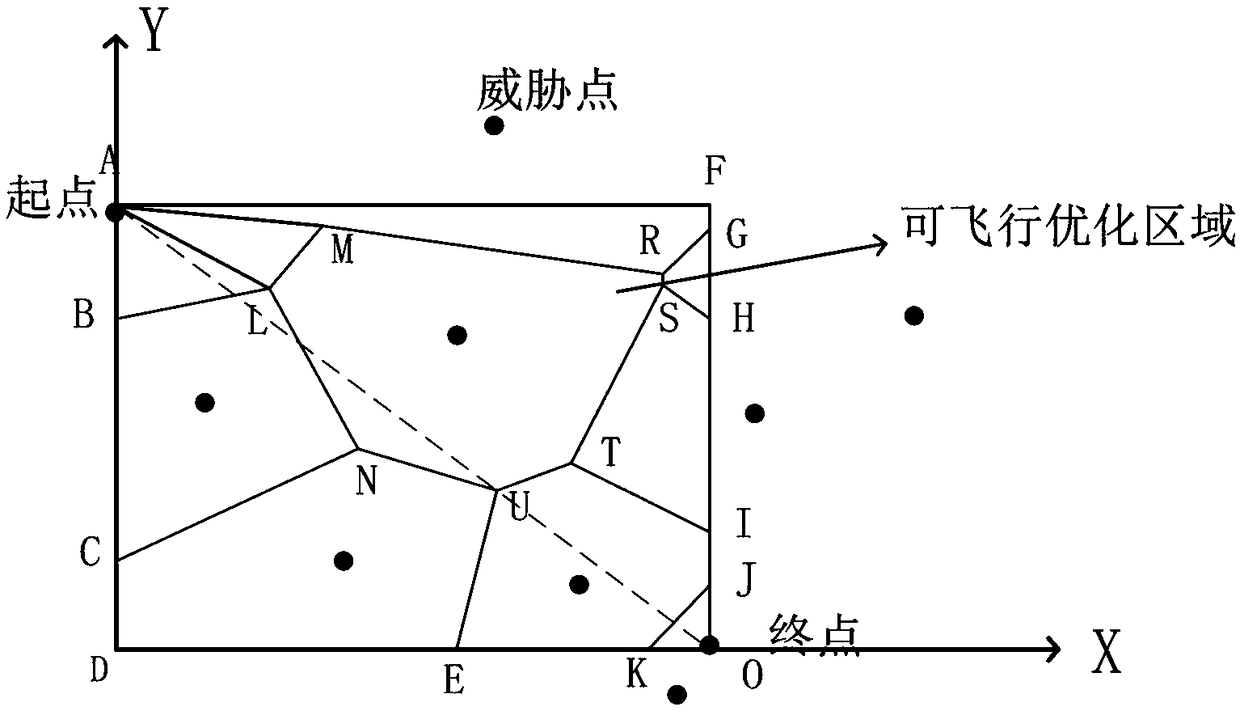
[0032] Step 2, make a rectangle with the starting point and end point as the diagonal line, and the flyable path is in the rectangular area, including the rectangular sides, such as figure 2 ;
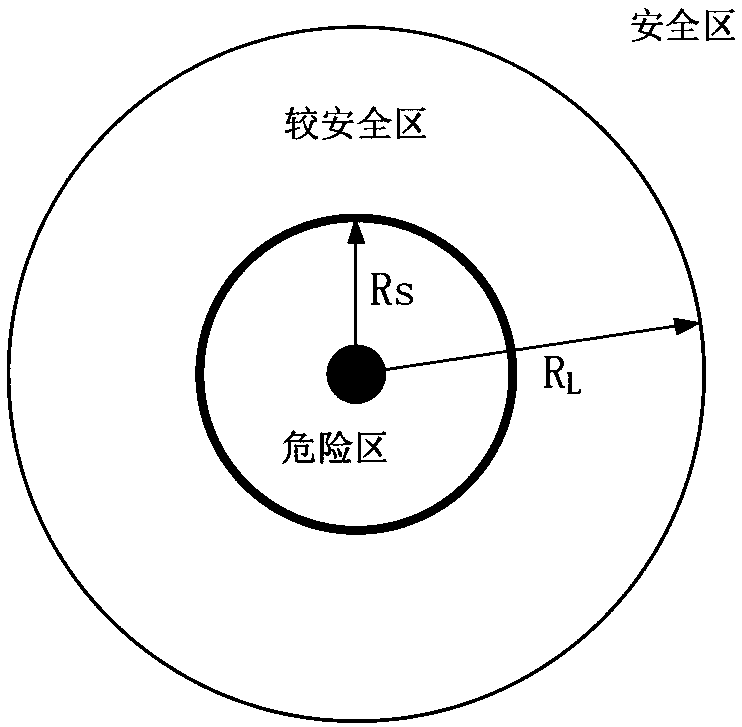
[0033] Step 3, such as image 3 As shown, the threat of obstacles is replaced by a circle with a radius of R (threat area), R L Outside the safety zone, R L with R S The area between is a relatively safe area, R S The area within is the danger zone. Set three levels for the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More