

Method for selecting unmanned vehicle path tracking movement target point
A moving target and path tracking technology, applied in vehicle position/route/height control, non-electric variable control, two-dimensional position/course control, etc., can solve problems such as tracking irregularities, improve accuracy, and reduce the amount of calculation The effect of simplicity, principle and calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
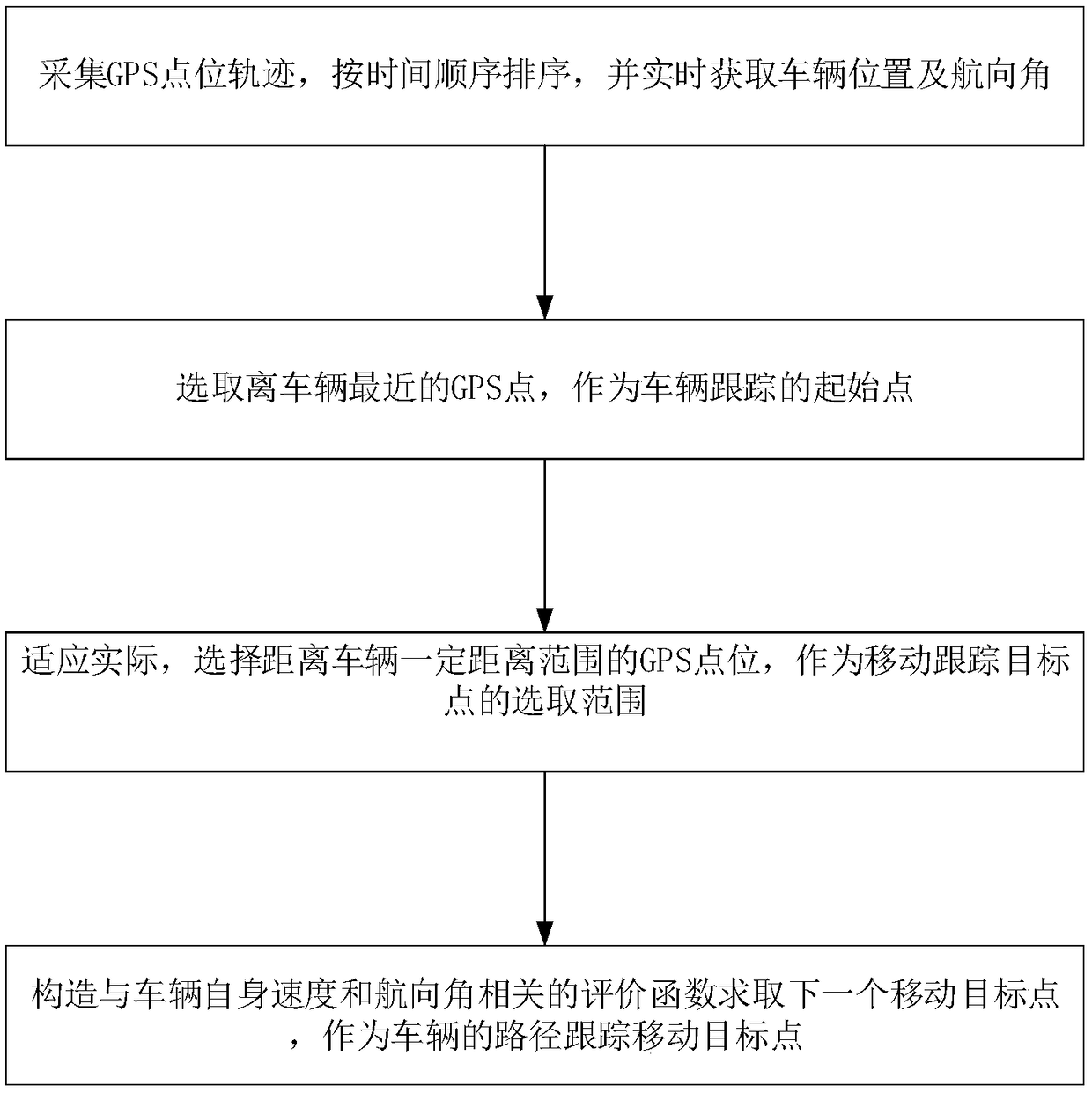
[0032] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0033] The principle and calculation process of the path tracking moving target point selection method provided by the embodiment of the present invention are simple, the amount of calculation is small, and it is easy to implement in an embedded system. In addition, by realizing the high-precision satellite and path tracking algorithm in an embedded system Combined, the accuracy of path tracking is improved.
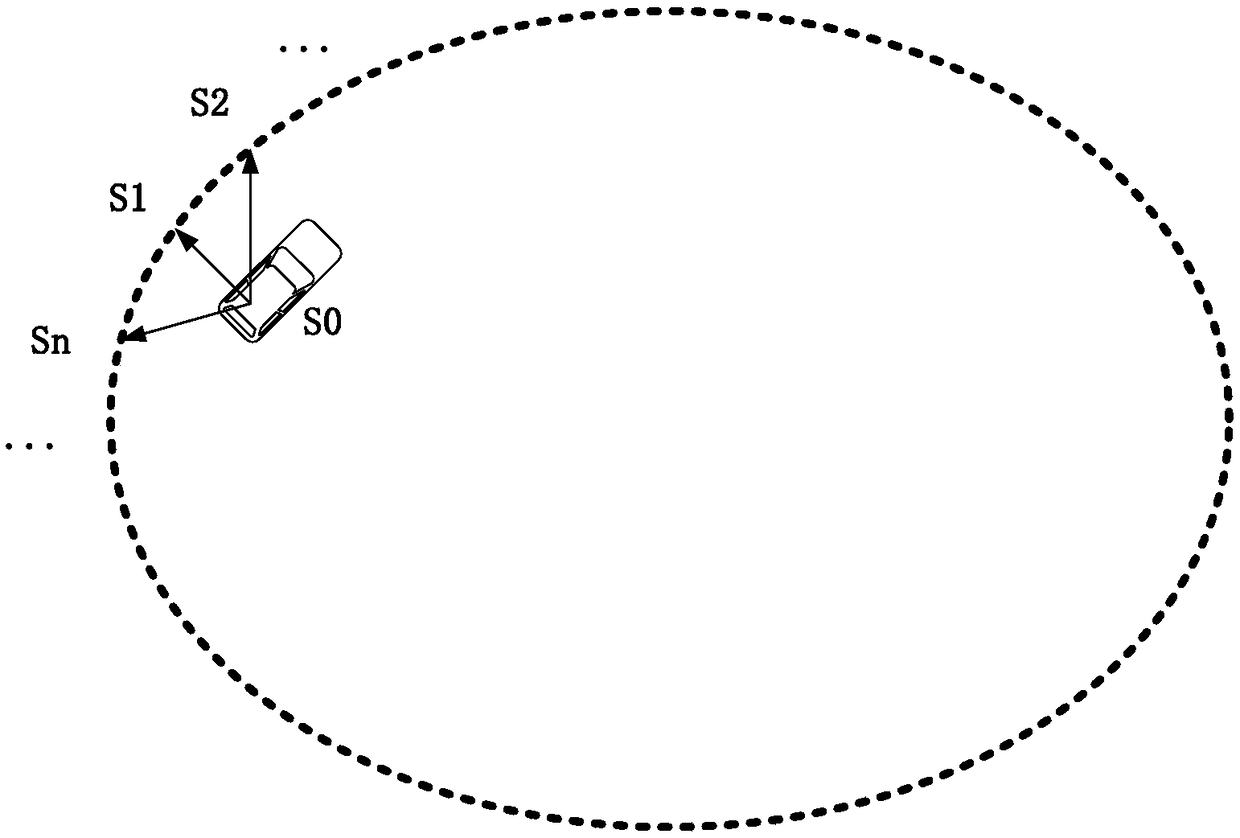
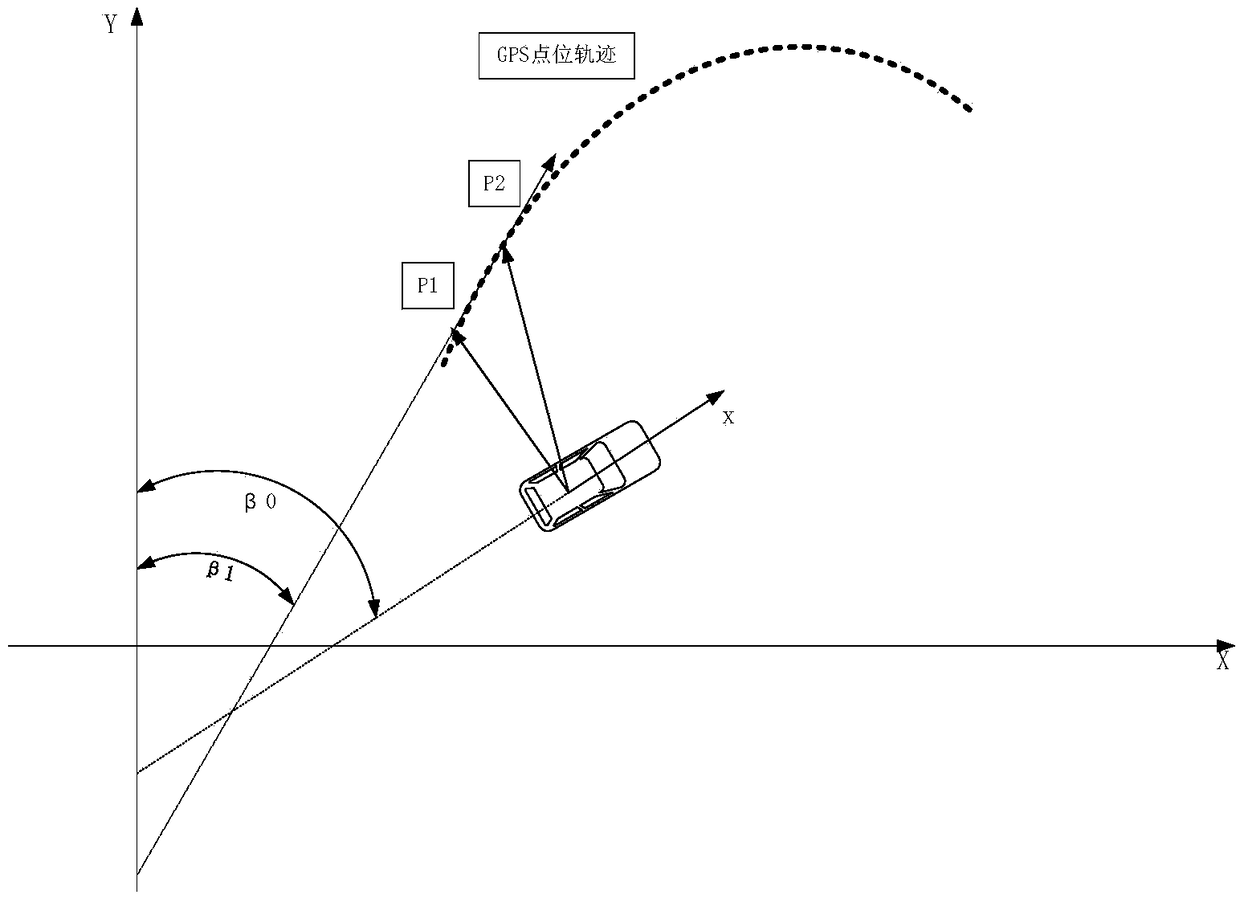
[0034] In the embodiment of the present invention, a method for selecting a moving target point for unmanned vehicle path tracking is provided. The method uses centimeter-level high-precision...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More