

Human pose estimation based on directional image fusion
A pose estimation and direction map technology, applied in the fields of image processing and computer vision, can solve problems such as difficult identification of key points, slow down training speed, occluded pose estimation, etc., achieve easy convergence of training, better robustness, and improve prediction The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions provided by the present invention will be described in detail below in conjunction with specific examples. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
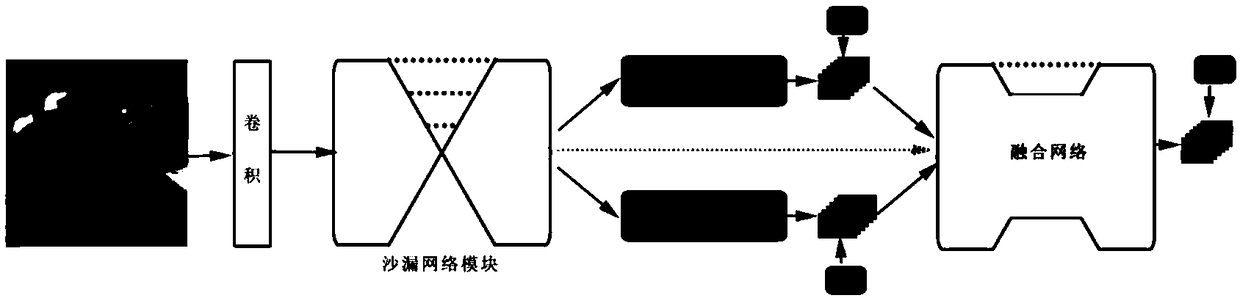
[0021] The method for estimating the human body posture by fusing the direction diagram provided by the present invention uses a deep convolutional network to realize end-to-end learning. The network structure is as follows: figure 1 shown. First use a simple convolutional network to preliminarily process the input RGB image to obtain basic features. Afterwards, higher-level features are obtained through an hourglass network module. Then the position heat map and the direction heat map are obtained through the position network and the direction network respectively. The fusion network in the latter stage fuses the position heat map, direction map and previous h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More