UAV flight route planning method, device, system and intelligent terminal
A technology of flight routes and drones, applied in traffic control systems, control/regulation systems, vehicle position/route/height control, etc., can solve the problems of high safety hazards, poor operation effects, undulating terrain and ridges of drones Problems such as inconsistencies in directions can be solved to achieve the effect of improving operational safety, high accuracy, and ensuring heading accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
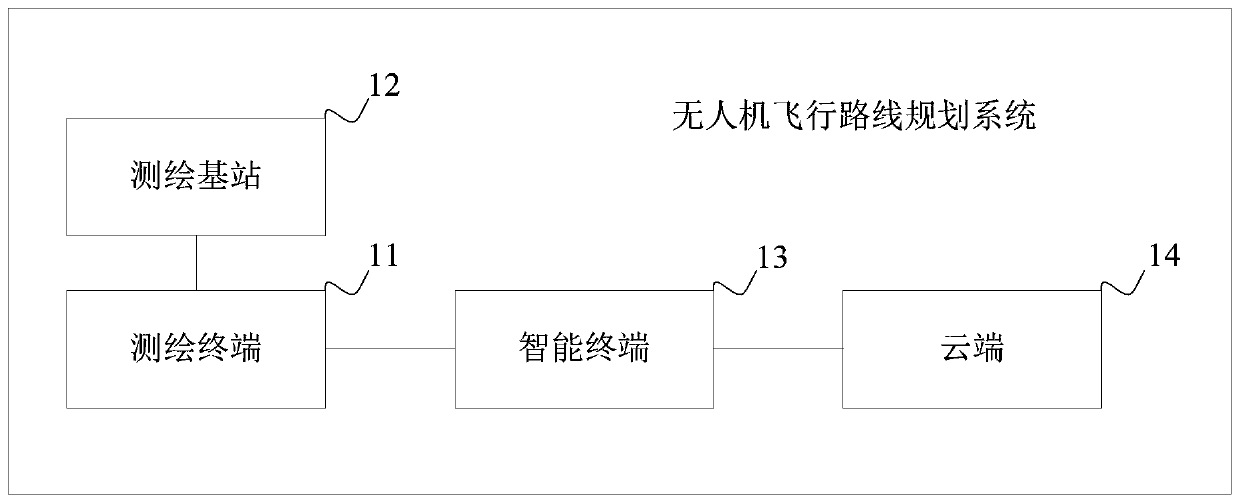
[0058] See figure 1 , is a schematic block diagram of the system architecture of a UAV flight route planning system provided by an embodiment of the present invention, the system may include a surveying and mapping terminal 11, a surveying and mapping base station 12, and an intelligent terminal 13; the surveying and mapping terminal 11, the surveying and mapping base station 12, and the intelligent terminal 13 communication connection;
[0059] The surveying and mapping terminal is used to measure the waypoint information of the waypoint, and send the waypoint information to the smart terminal;
[0060] The intelligent terminal is used to obtain waypoint information; among them, the waypoint is based on the terrain undulations of the plot to be operated, according to the preset dot rule, and according to the direction of the object to be operated on the plot to be operated. Point information, display each waypoint in the corresponding position of the plot map to be operated;...
Embodiment 2
[0068] After introducing the system architecture of the UAV flight route planning system, the specific planning process of the UAV flight route planning method provided by the embodiment of the present invention will be described in detail below.
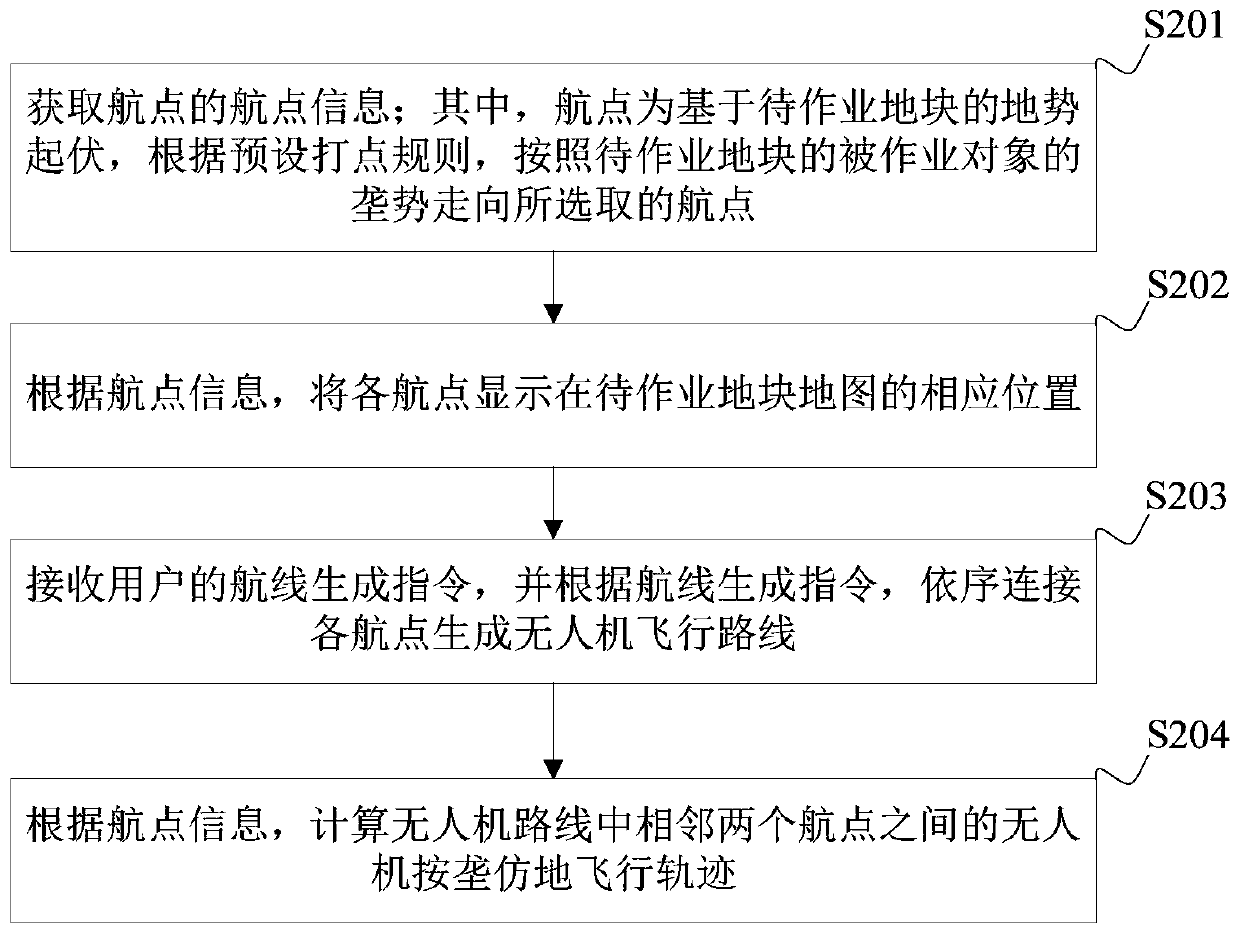
[0069] See figure 2 , is a schematic flow chart of a method for planning a UAV flight route provided by an embodiment of the present invention, the method may include the following steps:
[0070] Step 201. Obtain the waypoint information of the waypoint; wherein, the waypoint is a waypoint selected based on the terrain undulation of the plot to be operated, according to the preset dot rule, and according to the trend of the object to be operated on the plot to be operated.
[0071] It should be noted that the above-mentioned plots to be operated may be plots with large terrain fluctuations, such as mountains, slopes, etc., or plots with small terrain fluctuations, such as plains. In comparison, although the technical solutions pr...
Embodiment 3
[0091] See Figure 4 , which is another schematic flow diagram of the UAV flight route planning method provided by the embodiment of the present invention, the method may include the following steps:
[0092] Step 401 , acquiring waypoint information of the waypoint.
[0093] It should be noted that this step is the same as the above-mentioned step 201, and for the corresponding introduction, refer to the corresponding content above, and details are not repeated here.
[0094] Step 402 , according to the waypoint information, display each waypoint at the corresponding position on the map of the plot to be operated. This step is the same as the above-mentioned step 202, and for the corresponding introduction, refer to the corresponding content above, and details are not repeated here.
[0095] Step 403 , displaying waypoint information at a preset interface position; receiving a waypoint recording instruction from a user; and recording the waypoint according to the waypoint r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More