

Full-automatic book management robot
A book management and fully automatic technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of low work efficiency, high cost, heavy labor, etc., and achieve precise positioning, suitable for application and promotion, and significant beneficial effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
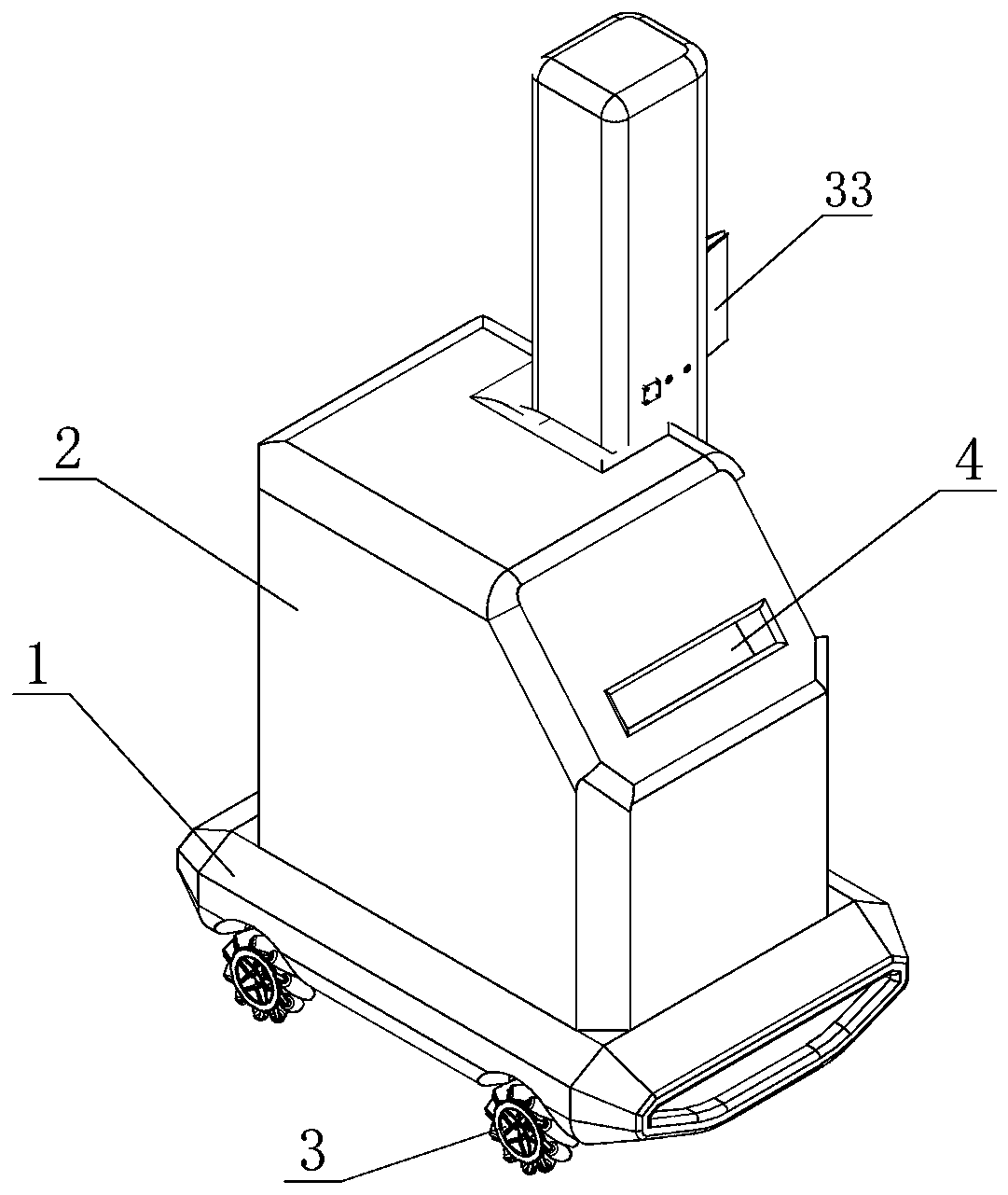
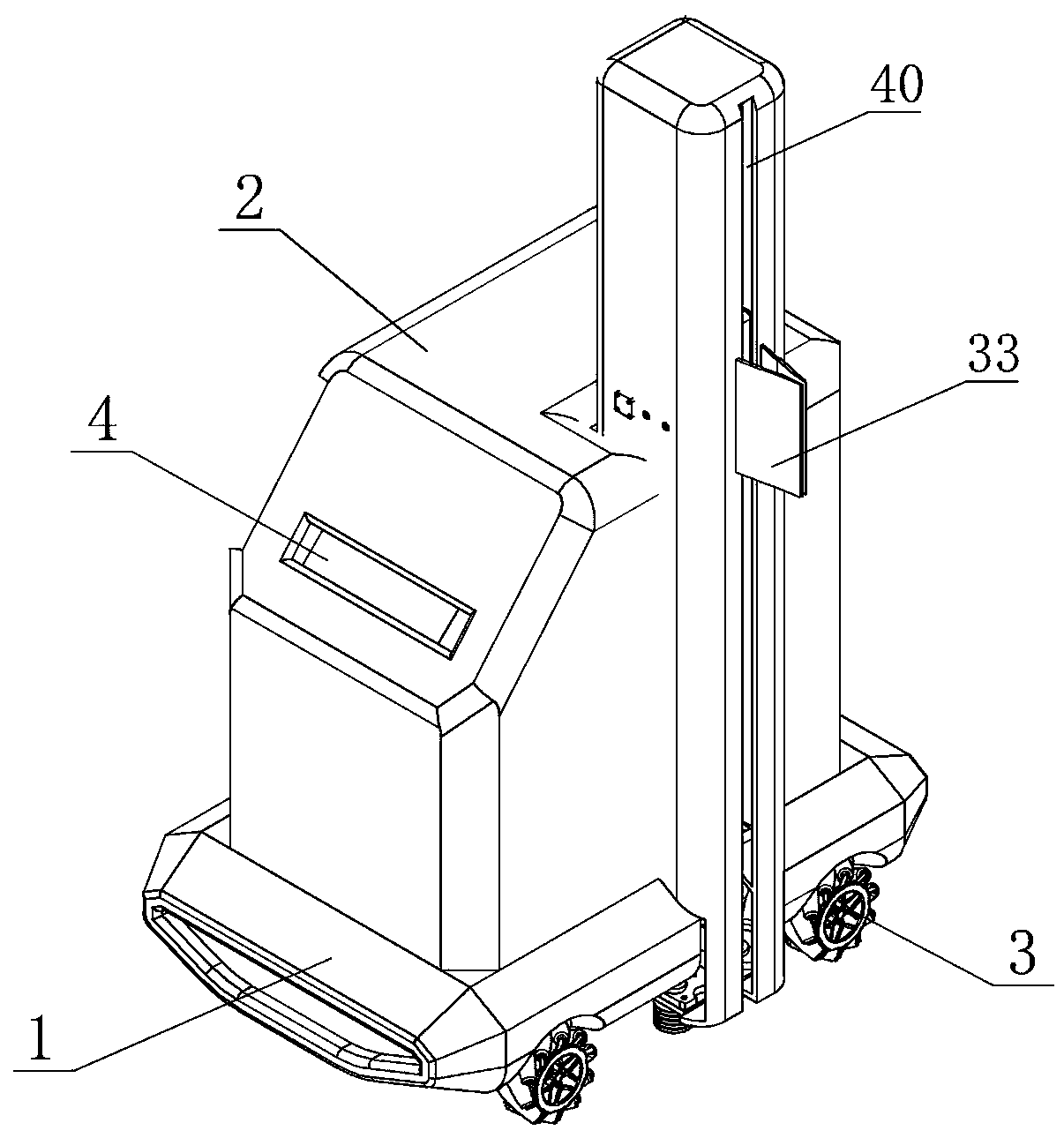
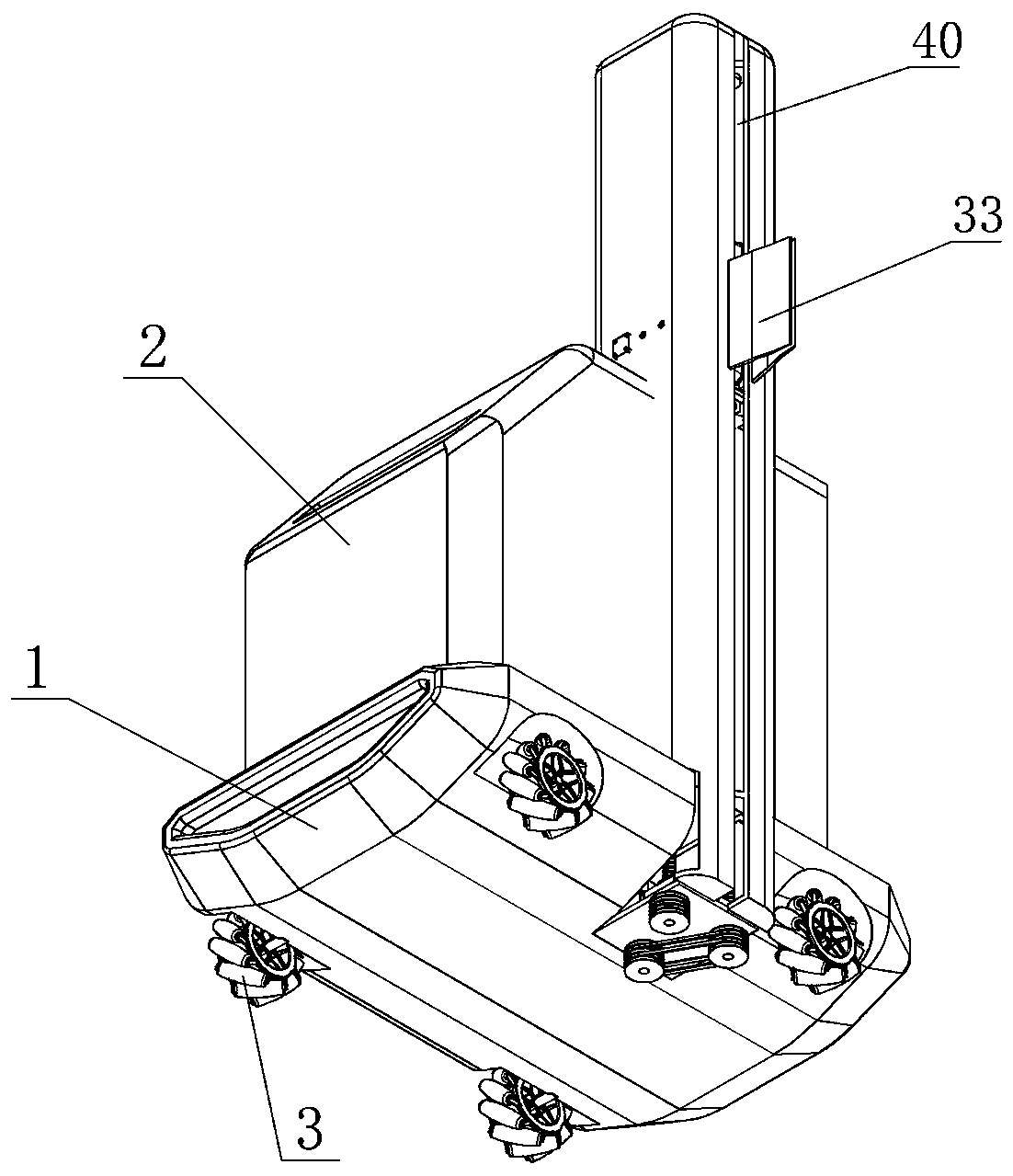
[0027] Such as figure 1 , figure 2 and image 3 Shown, all provide the three-dimensional view of the fully automatic book management robot of the present invention, as Figure 4 , Figure 5 and Figure 6 As shown, the perspective view of the invented fully automatic book management robot after removing the shell is given. The shown fully automatic book management robot consists of a base 1, an outer shell 2, an inner shell 5, a carrying mechanism, a transfer mechanism, a lifting mechanism, a take-off The base 1 is used for fixing and supporting. Four wheels 3 are arranged on the four corners of the base 1. Each wheel 3 is driven by a separate drive motor. The front end of the housing 2 is provided with an infrared sensor 41. In order to realize the detection of obstacles on the road during the walking process, in this way, the robot can walk accor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More