

A walking mechanism of an underwater inspection robot and its application method
A technology for inspection robots and walking mechanisms, which is applied in the direction of motor vehicles, cable installation, color TV parts, etc., and can solve problems such as inability to achieve height adjustment, blocked movement, and insufficiently clear shooting pictures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
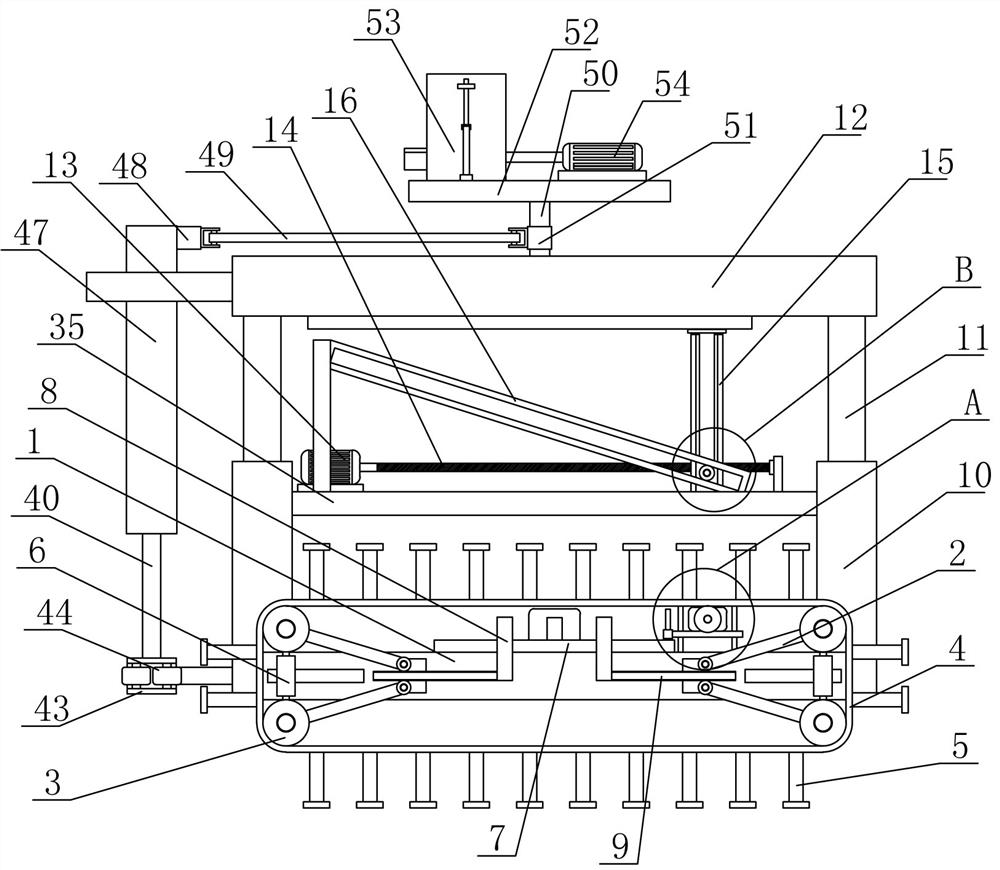
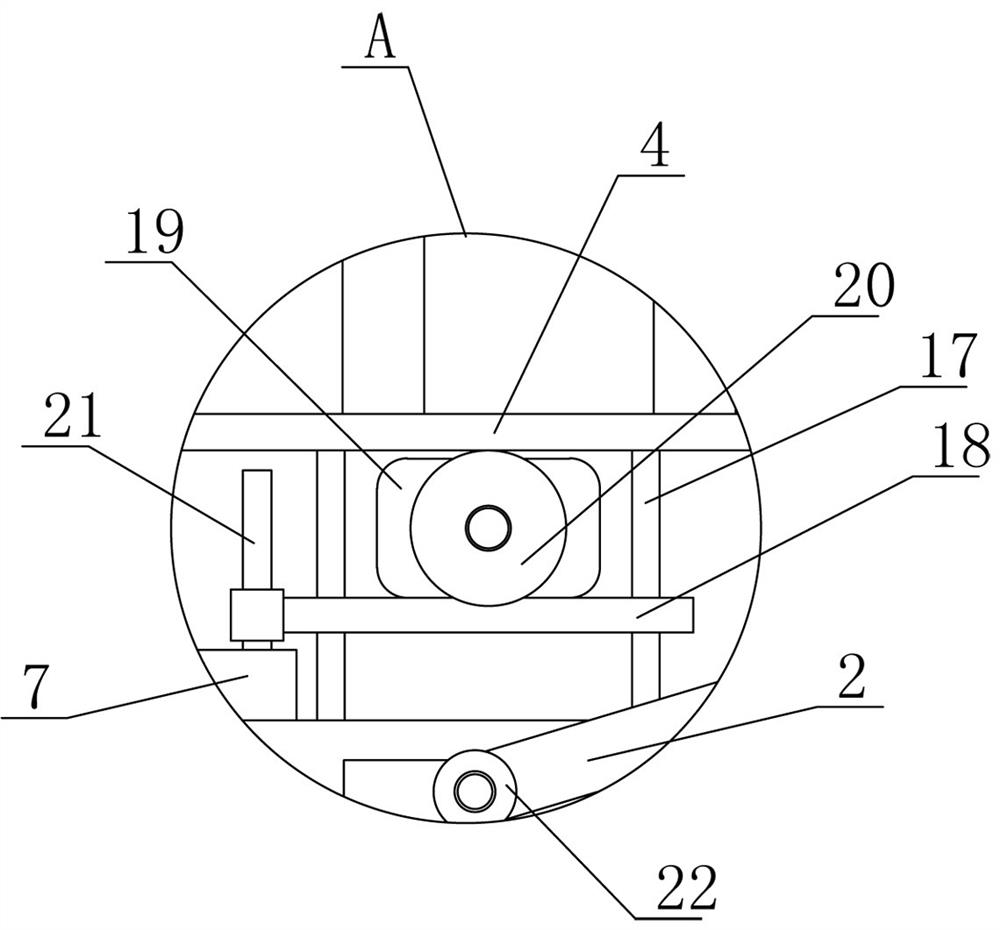
[0051] like Figure 1-Figure 9 As shown, a walking mechanism of an underwater inspection robot includes a chassis 1, and four rotating rods 2 are symmetrically connected to both sides of the chassis 1, and one side of the rotating rod 2 is connected to a guide wheel 3, which is located The same crawler belt 4 is connected to the four guide wheels 3 on the side, and a plurality of grab bars 5 are fixedly installed on the outer side of the crawler belt 4. The top of the chassis 1 is slidingly connected to a moving plate 7, and the chassis 1 is symmetrically slidingly connected to a Two moving frames 8, the two moving frames 8 are connected to the corresponding four rotating rods 2 respectively, the moving plate 7 is connected to the two moving frames 8 respectively, the top side of the chassis 1 is fixedly equipped with a rotating motor 26, and The output shaft of the rotating motor 26 is connected with the transmission of the mobile plate 7, and the top side of the chassis 1 is...
Embodiment 2
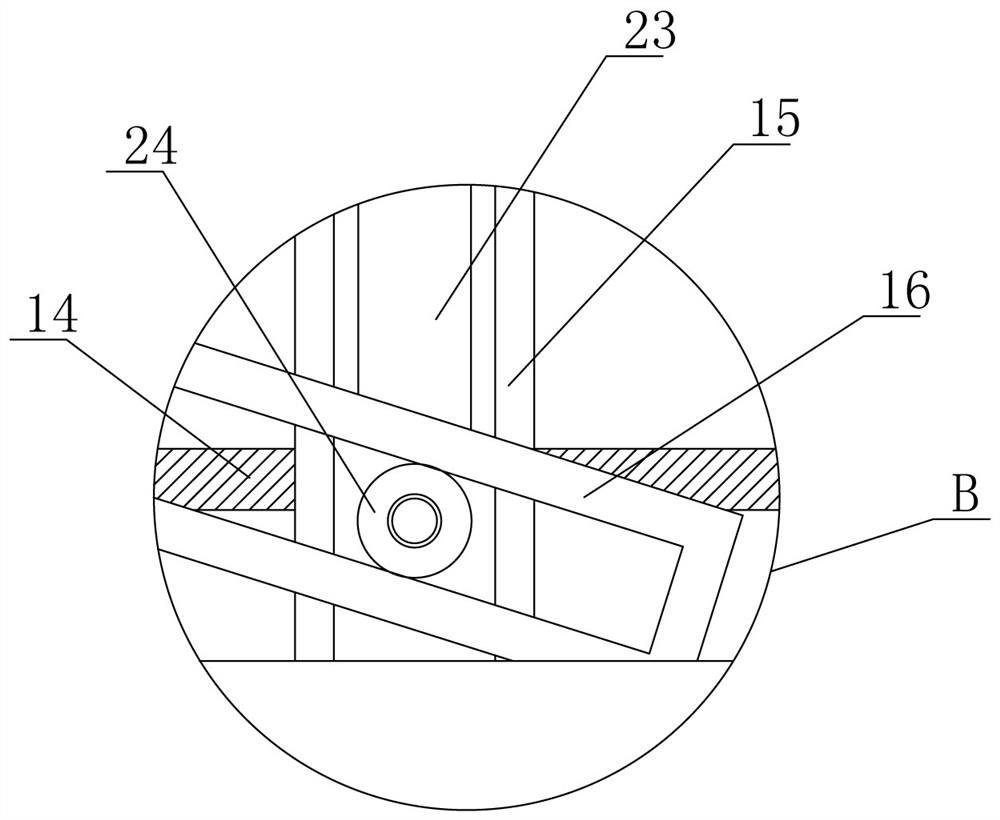
[0067] like Figure 10-Figure 15 As shown, a walking mechanism of an underwater inspection robot, the difference between this embodiment and the first embodiment is that an electric push rod 45 is fixedly installed on one side of the connection plate 42, and the output shaft of the electric push rod 45 runs through the connection plate 42 and is fixedly connected with one side of the U-shaped frame 43, and one side of the U-shaped frame 43 is symmetrically fixed with two stroke rods, and the two stroke rods all pass through the connecting plate 42 and are all slidably connected with the connecting plate 42, and the supporting plate The top of 12 is rotatably connected with a rotating shaft 50, and the top of the rotating shaft 50 is fixedly connected with the bottom of the supporting plate 52. The fixed sleeve on the rotating shaft 50 is provided with a fixed rod 51, and one side of the fixed rod 51 is symmetrically rotated and connected with two guide rods 49. One end of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More