

Four-pile positioning-based suction cup type wall-climbing paint spraying robot and working method thereof
A robot and sucker-type technology, applied in the field of wall-climbing painting robots based on four-pillar positioning sucker, can solve the problems of high power consumption, high manufacturing cost, strict requirements of the surrounding environment, etc., to reduce the possibility of falling, Improve efficiency and quality, paint a full and even effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
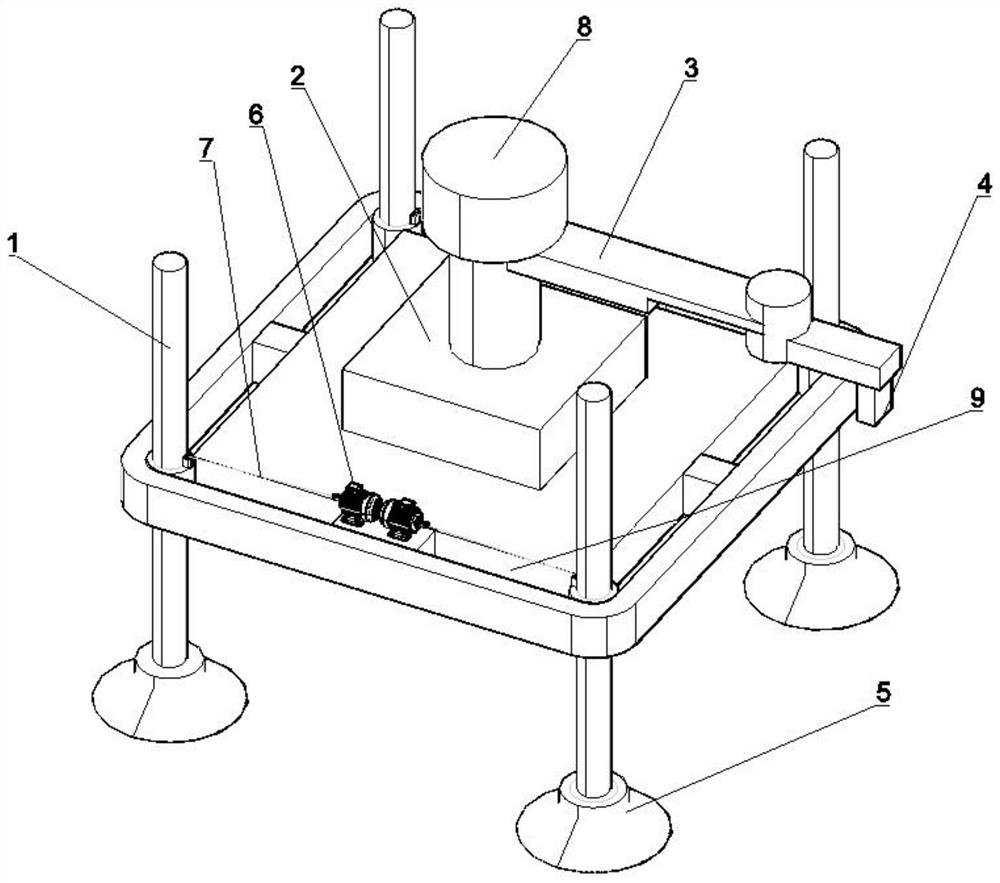
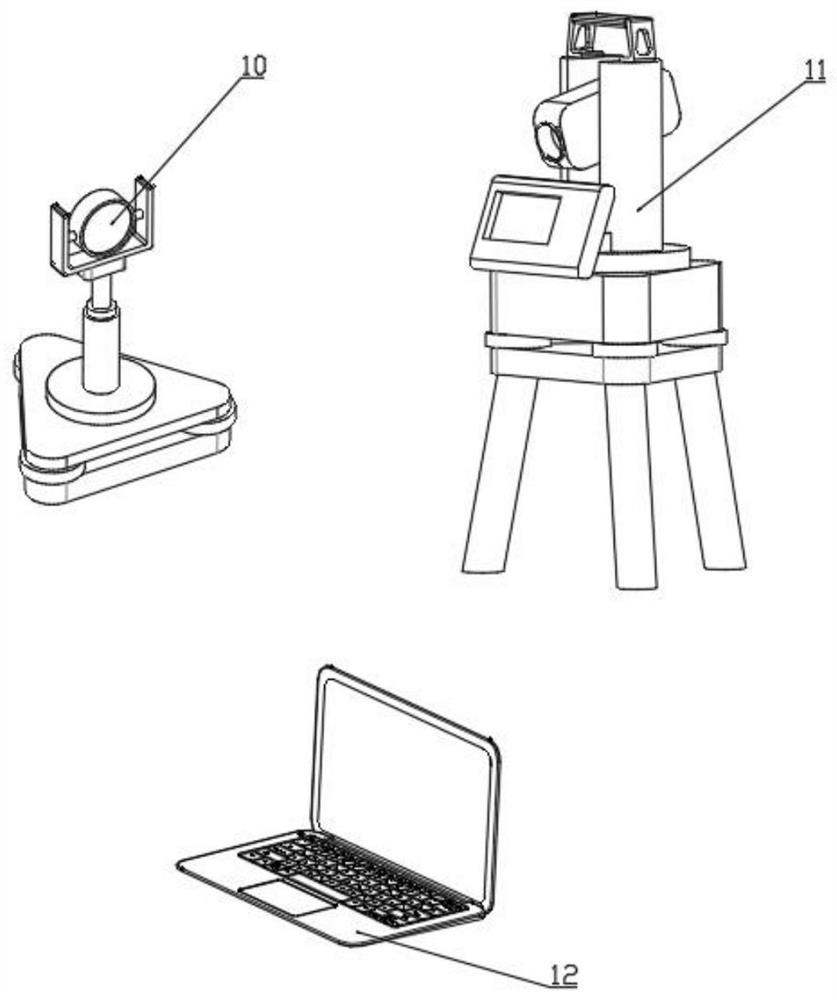
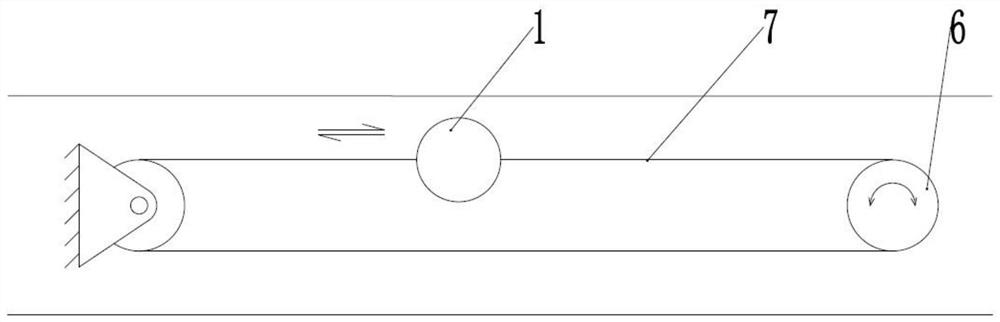
[0036] see Figure 1-Figure 3 , figure 1 It is a schematic diagram of a three-dimensional structure of an embodiment of the present invention; figure 2 A schematic diagram of a total station and a prism used in conjunction with the present invention; image 3 for the invention figure 1 Schematic diagram of the connection structure of the middle traction mechanism.
[0037] In a specific embodiment, in the first aspect, the embodiment of the present invent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More