

Portable industrial robot based on multi-dimensional sensor real-time data feedback fusion
An industrial robot, real-time feedback technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., to achieve the effect of reducing production costs, high flexibility, and high load strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with accompanying drawing:
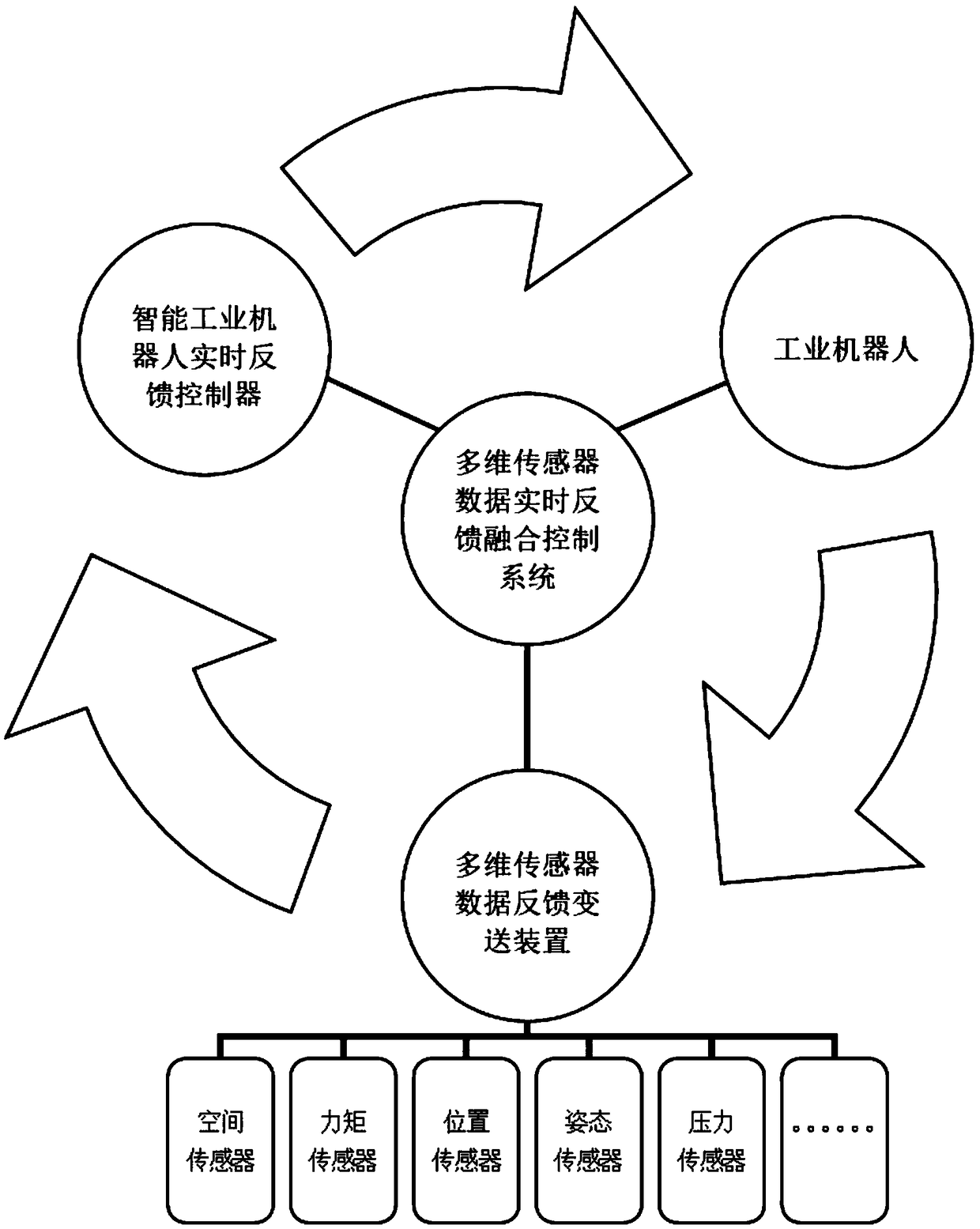
[0034] Referring to the accompanying drawings: the portable industrial robot based on multi-dimensional sensor real-time data feedback fusion in this embodiment includes a multi-dimensional sensor data real-time feedback fusion control system, and the multi-dimensional sensor data real-time feedback fusion control system is connected with industrial robots, Intelligent industrial robot real-time feedback controller, multi-dimensional sensor data feedback transmission device, industrial robot, intelligent industrial robot real-time feedback controller, multi-dimensional sensor data feedback transmission device form multi-dimensional sensor data real-time feedback fusion control system through multi-dimensional sensor data real-time feedback Feedback Fusion Control.
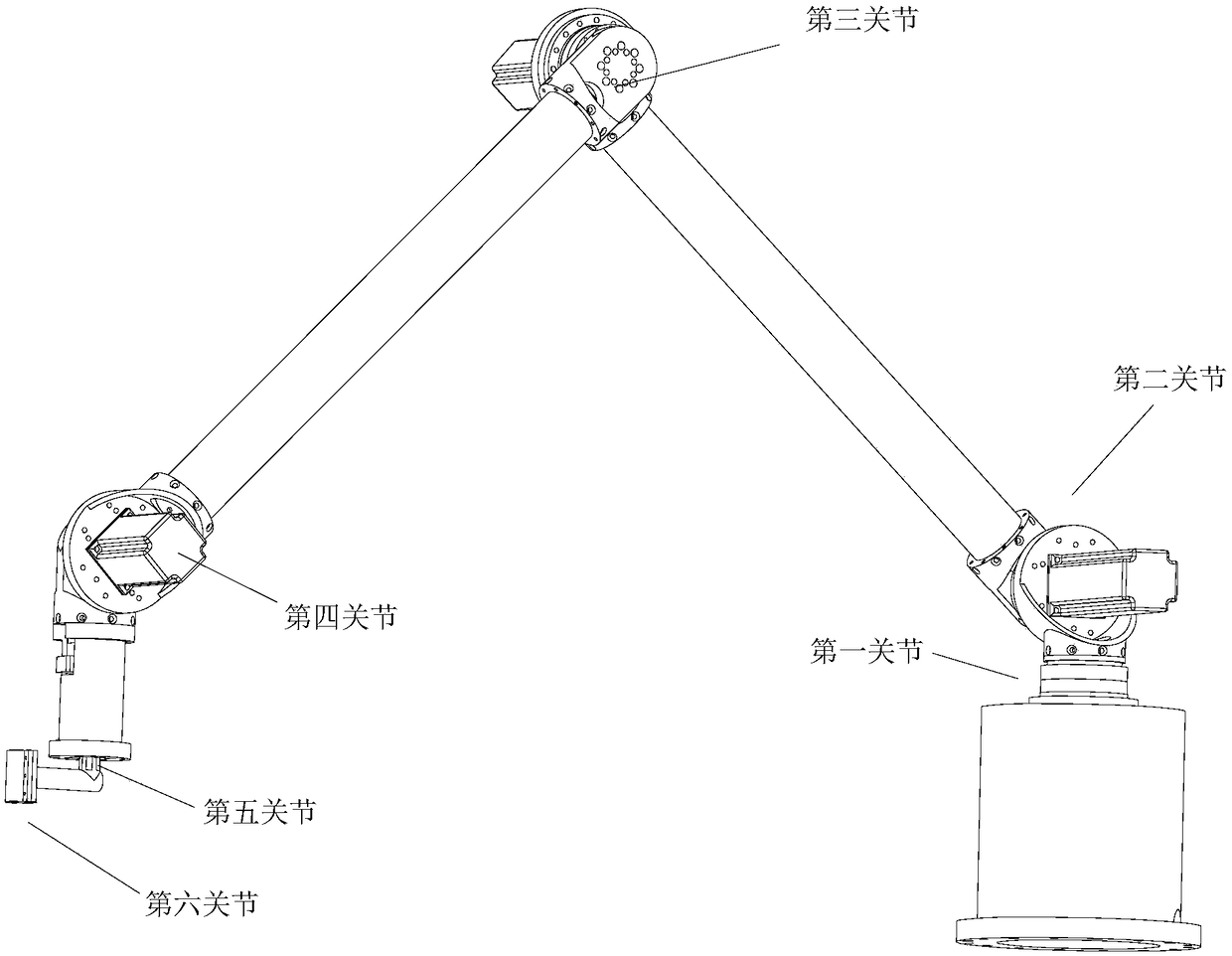
[0035] The industrial robot includes a robot body structure with no less than three movable joints, among whi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More