

Coordinated control method and coordinated control device for electronic differential and active differential steering
An electronic differential and coordinated control technology, applied in steering mechanism, transportation and packaging, non-deflectable wheel steering, etc., can solve the problems of auxiliary control system interference, aggravating the driver's manipulation burden, and the impact of vehicle speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
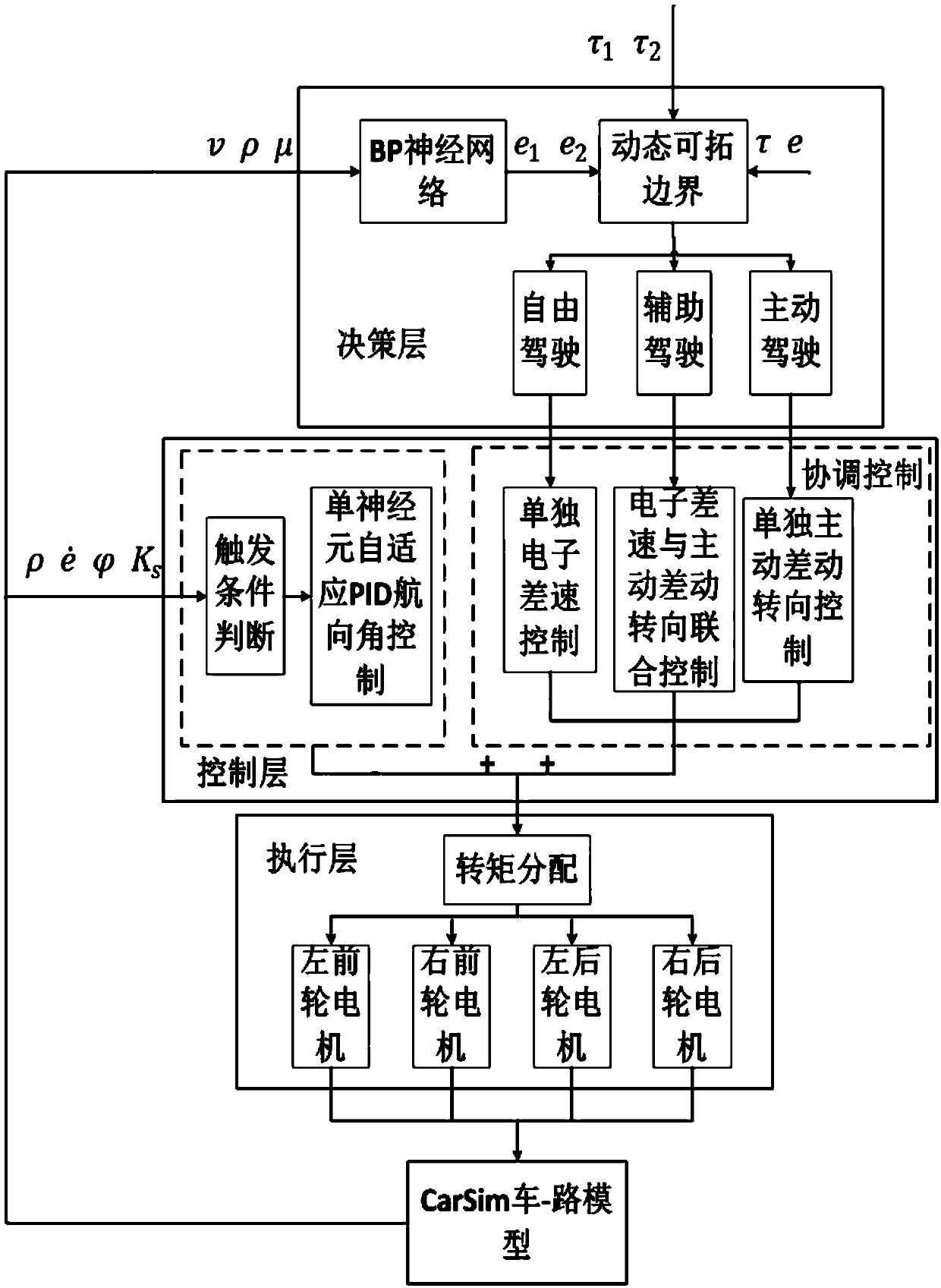
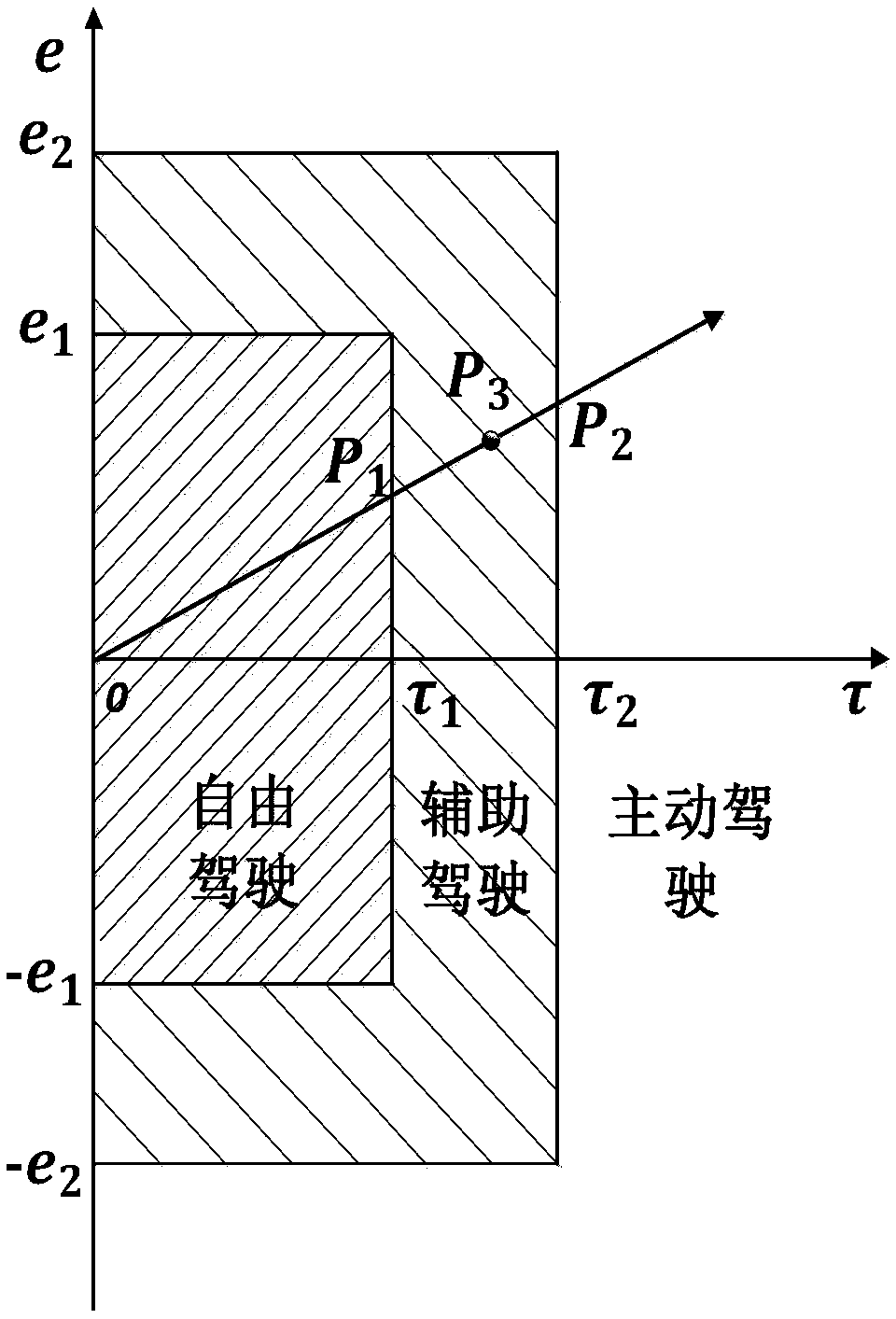
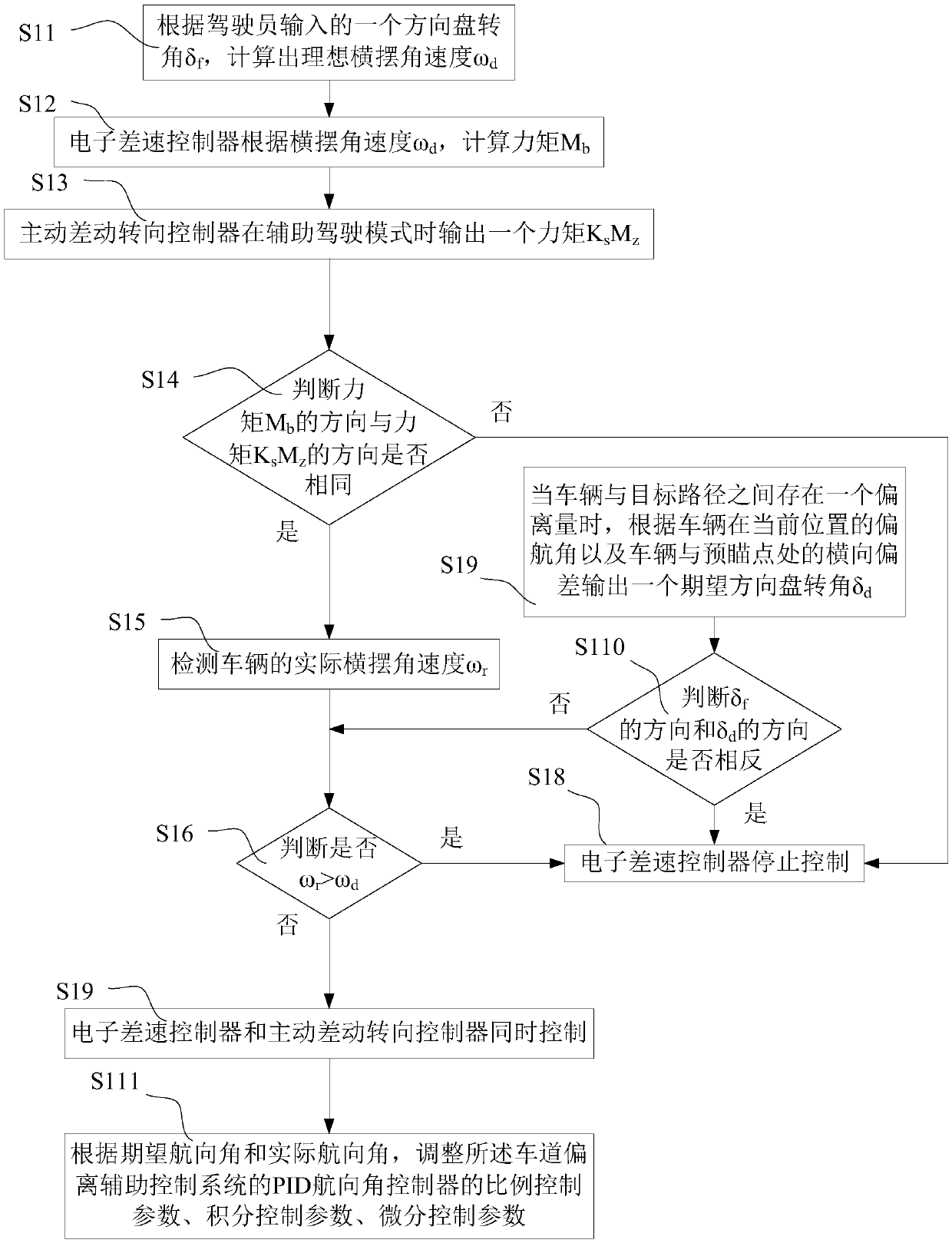
[0059] This embodiment discloses a lane departure auxiliary control system for an in-wheel motor driven vehicle. The structure of the control system includes: an upper dynamic boundary extension decision-making layer, a middle control layer and a bottom execution layer. The extension decision-making layer is based on the dynamic boundary and the extension decision-making divides different driving modes according to different lane departure degrees; the middle-level control layer adopts different control methods according to the different driving modes divided by the decision-making layer; the contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More