

Single-leg hopping robot based on parallel mechanism
A robot, single-leg technology, applied in the field of robotics, can solve the problems of structural robots difficult to maintain balance, complex control system, unable to move laterally, etc., to achieve the effect of reducing experimental cost, simple control method, and simplified structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
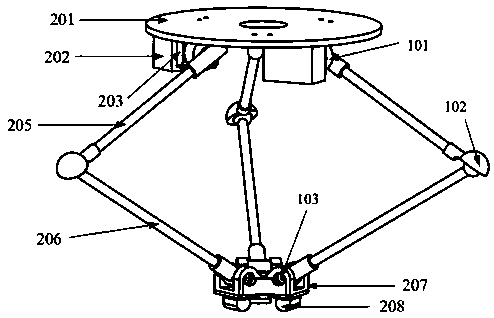
[0031] Depend on figure 1 As shown, the single-leg jumping robot based on the parallel mechanism of the present invention includes a static platform 201, a dynamic platform 207, a foot rubber pad 208, and three identical RSR series branch chains. The three RSR series branch chains are connected between the static platform and the dynamic platform. Evenly distribute settings across platforms. Each RSR series branch chain respectively includes a motor bracket 202 , a motor 203 , an elastic coupling (not shown), a driving rod 205 and a driven rod 206 . The motor bracket 202 is fixedly connected with the static platform 201 by screws, the motor 203 is fixedly connected with the motor bracket 202 by screws, the output shaft of the motor transmits motion through an elastic coupling, and the elastic coupling and one end of the active rod 205 pass through the first rotating pair 101 Rotationally connected, the other end of the active rod 205 is connected with one end of the driven ro...
Embodiment 2
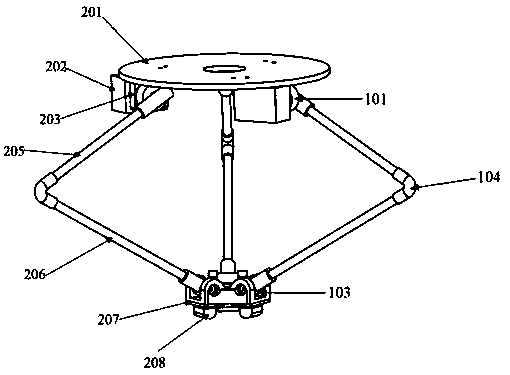
[0035] Such as image 3 As shown, the single-leg jumping robot based on the parallel mechanism of the present invention includes a static platform 201, a dynamic platform 207, a foot rubber pad 208, and three identical RSR series branch chains. The three RSR series branch chains are connected between the static platform and the dynamic platform. Evenly distribute settings across platforms. Each RSR series branch chain includes a motor bracket 202 , a motor 203 , an elastic coupling, a driving rod 205 and a driven rod 206 . The motor bracket 202 is fixedly connected with the static platform 201 by screws, the motor 203 is fixedly connected with the motor bracket 202 by screws, the output shaft of the motor transmits motion through an elastic coupling, and the elastic coupling and one end of the active rod 205 pass through the first rotating pair 101 Rotationally connected, the other end of the active rod 205 is connected with one end of the driven rod 206 through the elastic t...
Embodiment 3
[0038] Such as Figure 5 As shown, the single-leg jumping robot based on the parallel mechanism of the present invention includes a static platform 201, a dynamic platform 207, a sole rubber pad 208, and three identical RSR series branch chains composed of four parts. Each RSR series branch chain includes a motor bracket 202 , a motor 203 , an elastic coupling, a driving rod 205 and a driven rod 206 . The motor bracket 202 is fixedly connected with the static platform 201 by screws, the motor 203 is fixedly connected with the motor bracket 202 by screws, the output shaft of the motor transmits motion through an elastic coupling, and the elastic coupling and one end of the active rod 205 pass through the first rotating pair 101 Rotationally connected, the other end of the active rod 205 is connected with one end of the driven rod 206 through a spherical six-bar mechanism 105, the other end of the driven rod 206 is connected with the moving platform 207 through the second rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More