

Method for ranging deep learning obstacle based on binocular vision
A binocular vision and deep learning technology, applied in the field of deep learning obstacle ranging based on binocular vision, can solve the problems of inability to find obstacle targets, slow detection speed, etc., to ensure the safety of life and property, easy installation, The effect of preventing traffic accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
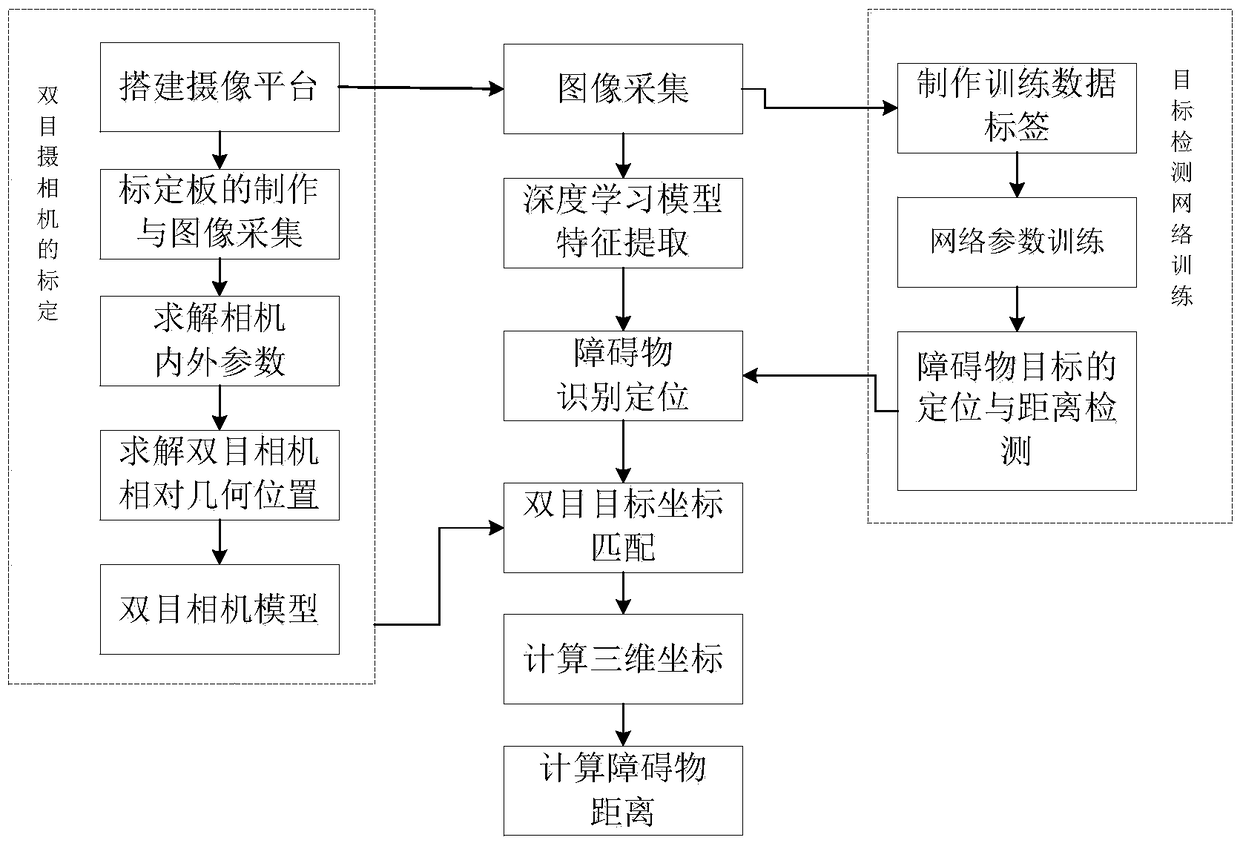
[0048] A binocular vision-based deep learning obstacle ranging method of the present invention, such as figure 1 as shown,
[0049] Step 1: set up the binocular vision data collection system that comprises binocular camera, described binocular camera bag includes first camera and second camera, described first camera and second camera are relatively fixed on the camera support frame;
[0050] Step 2: Establish a binocular camera projection model based on the pinhole camera principle, then calibrate the binocular camera, and obtain the internal parameter matrix of the binocular camera in the projection model, and the relative geometric relationship between the first camera and the second camera;
[0051] Use the checkerboard calibration board to calibrate, calculate the internal parameters of the binocular camera and the relative position bet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More