

A method and apparatus for closed-loop detection of scene pictures based on depth information
A deep information, closed-loop detection technology, applied in the field of intelligent navigation, can solve problems such as troublesome implementation, can only be applied to trained scenes, re-training, etc., to avoid the effect of mismatching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
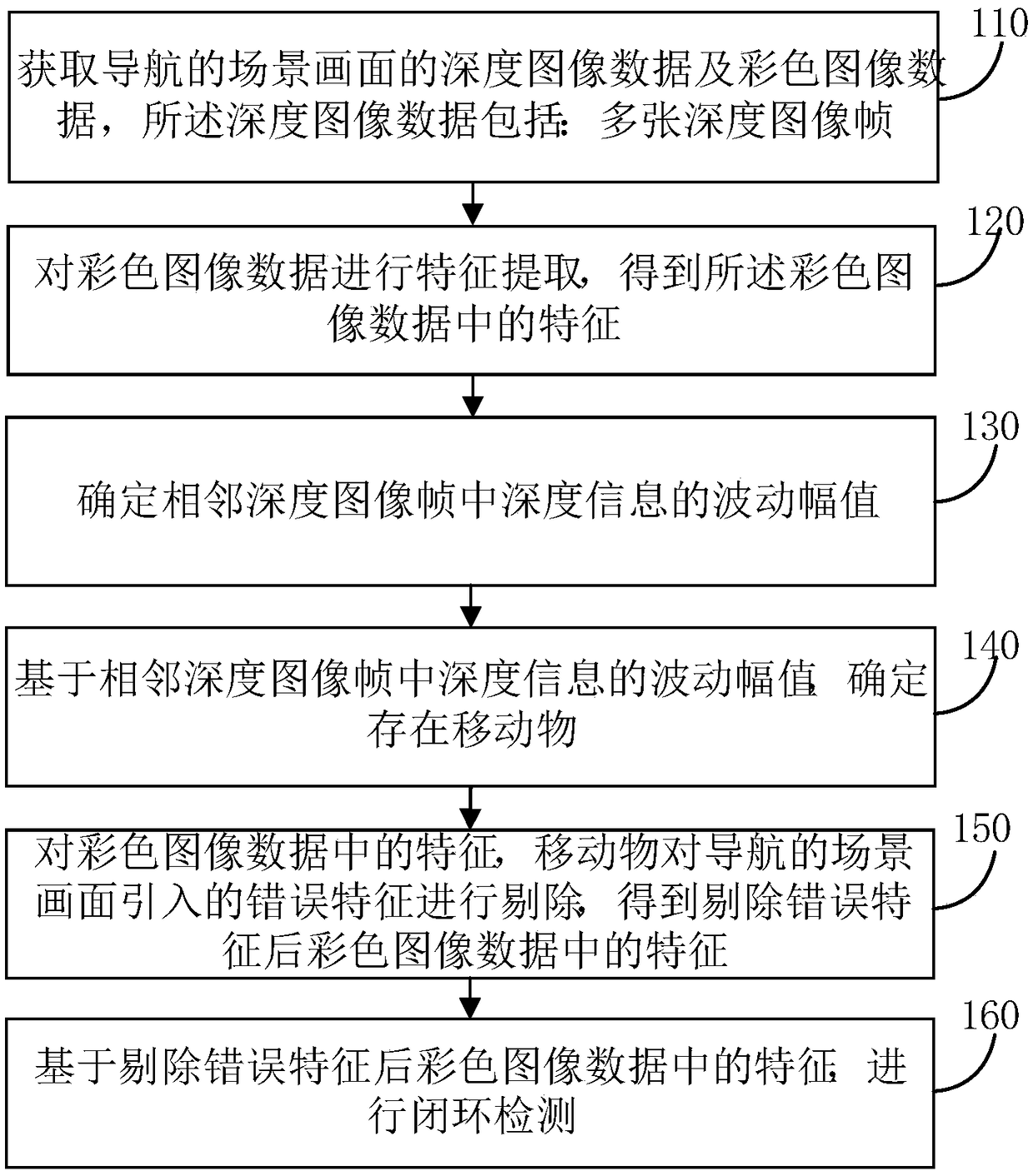
[0070] Aiming at the problem in the prior art that if the scene of robot navigation is changed, retraining is required, which is cumbersome to implement, and can only be applied to the trained scene, the embodiment of the present invention provides a method for closed-loop detection of scene pictures based on depth information , by obtaining the depth image data and color image data of the scene picture of the navigation, based on the fluctuation amplitude of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More