

Monocular camera realizes dynamic point three-dimensional measurement
A three-dimensional measurement and dynamic measurement technology, applied in the field of visual measurement, can solve the problems of loss of depth information of target points, difficulty in stereo matching of vision sensors, and high price.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
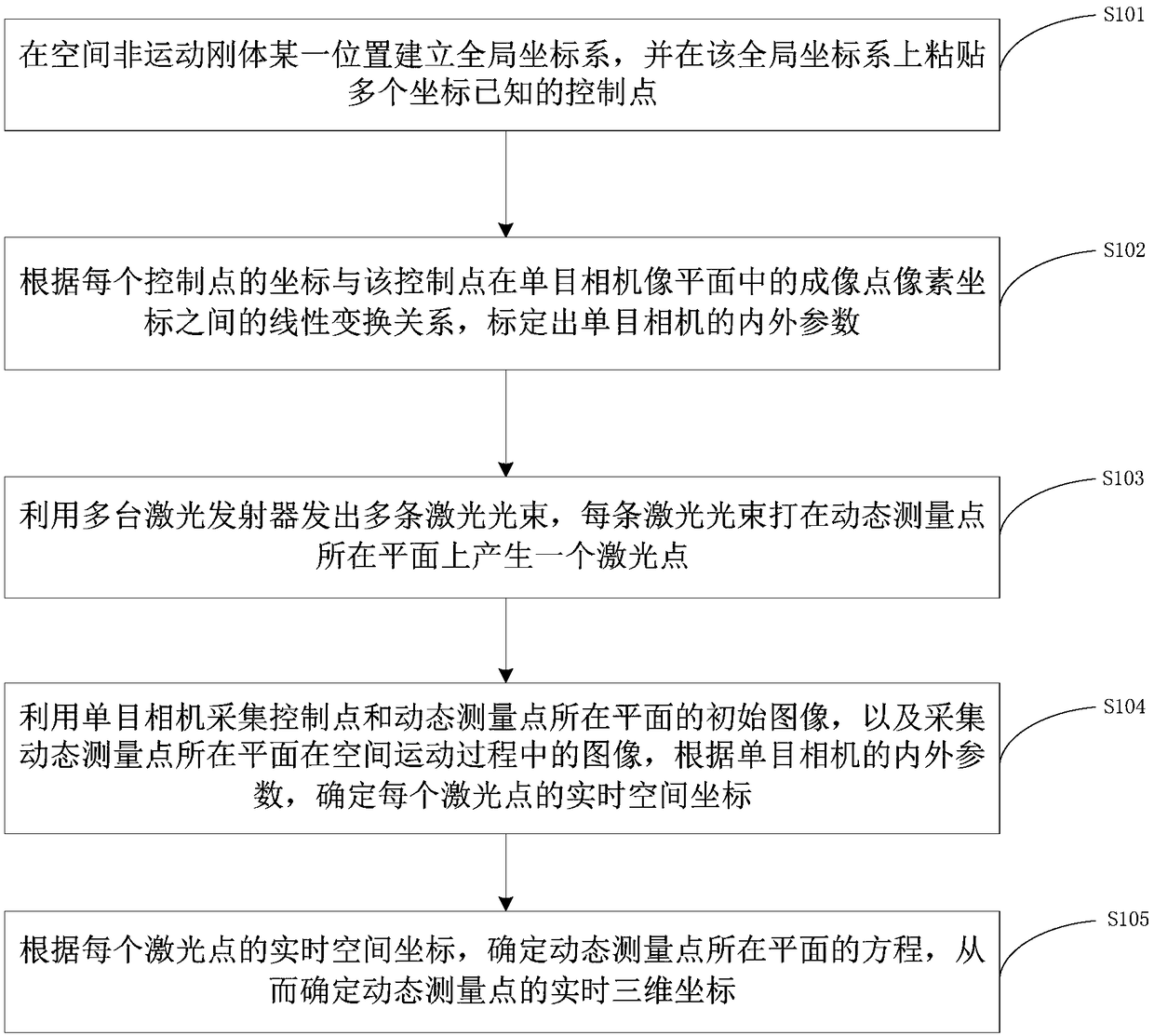
[0056] Such as figure 1 As shown, this embodiment provides a monocular camera to achieve dynamic point three-dimensional measurement method, the method includes the following steps:
[0057] S101. Establish a global coordinate system at a certain position of the non-moving rigid body in space, and paste a plurality of control points with known coordinates on the global coordinate system.
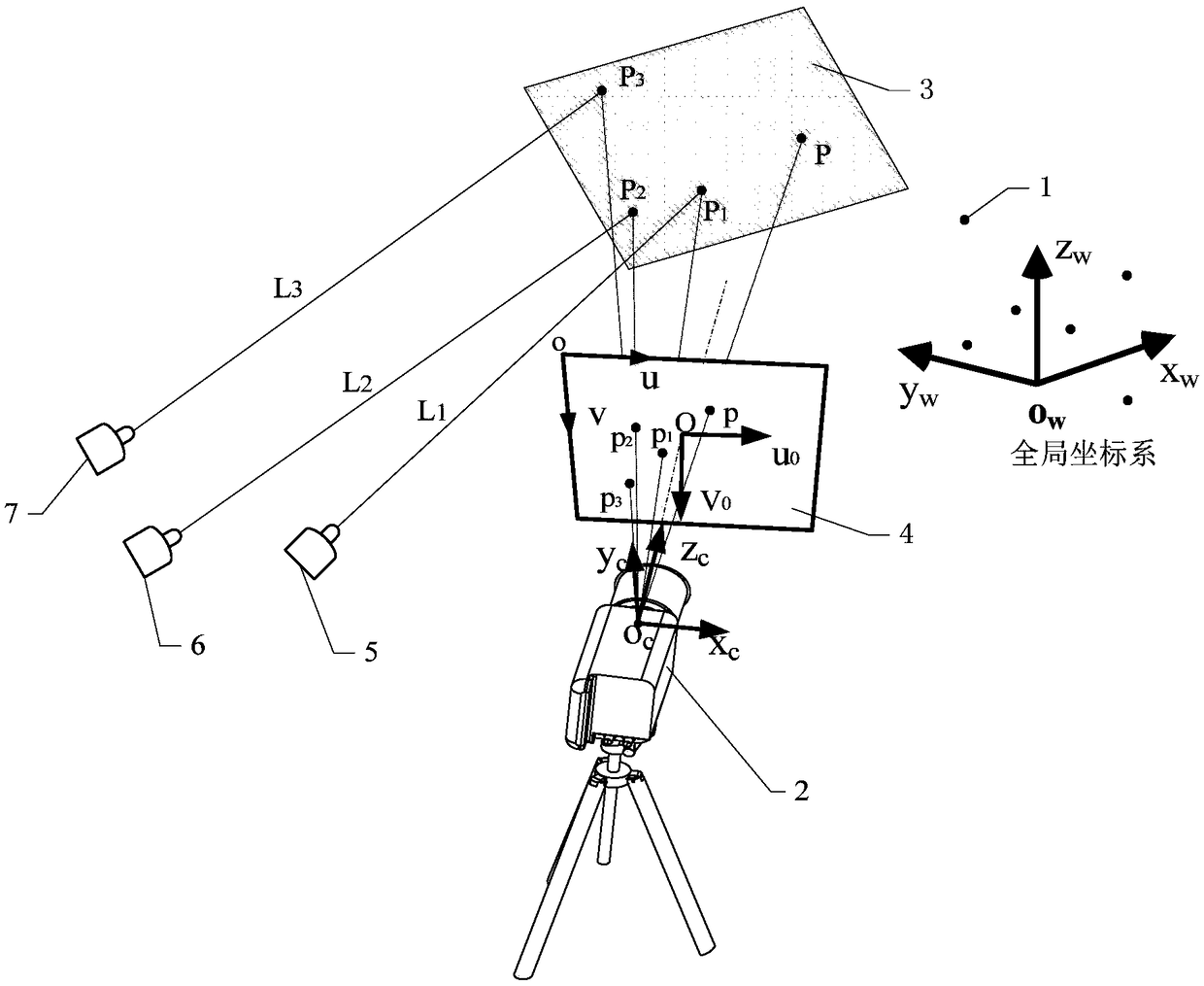
[0058] Such as figure 2 As shown, the global coordinate system established in this embodiment is o w -x w the y w z w , in the global coordinate system o w -x w the y w z w Paste six BMW control points 1 whose coordinates are known, at least four of which are not in the same plane, and the spatial distance between each control point 1 is as large as possible.
[0059] S102. According to the linear transformation relationship between the coordinates of each control point and the pixel coordinates of the imaging point of the control point in the image plane of the monocular camera, c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More