

Robust control method of dynamic biped walking robot
A walking robot, robust control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as limiting the design requirements of the controller, achieve a wide range of applications, improve stability and robustness , overcoming the effect of design limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0063] Example: such as Figure 1 to Figure 11 Shown; a dynamic biped walking robot robust control method, it includes:
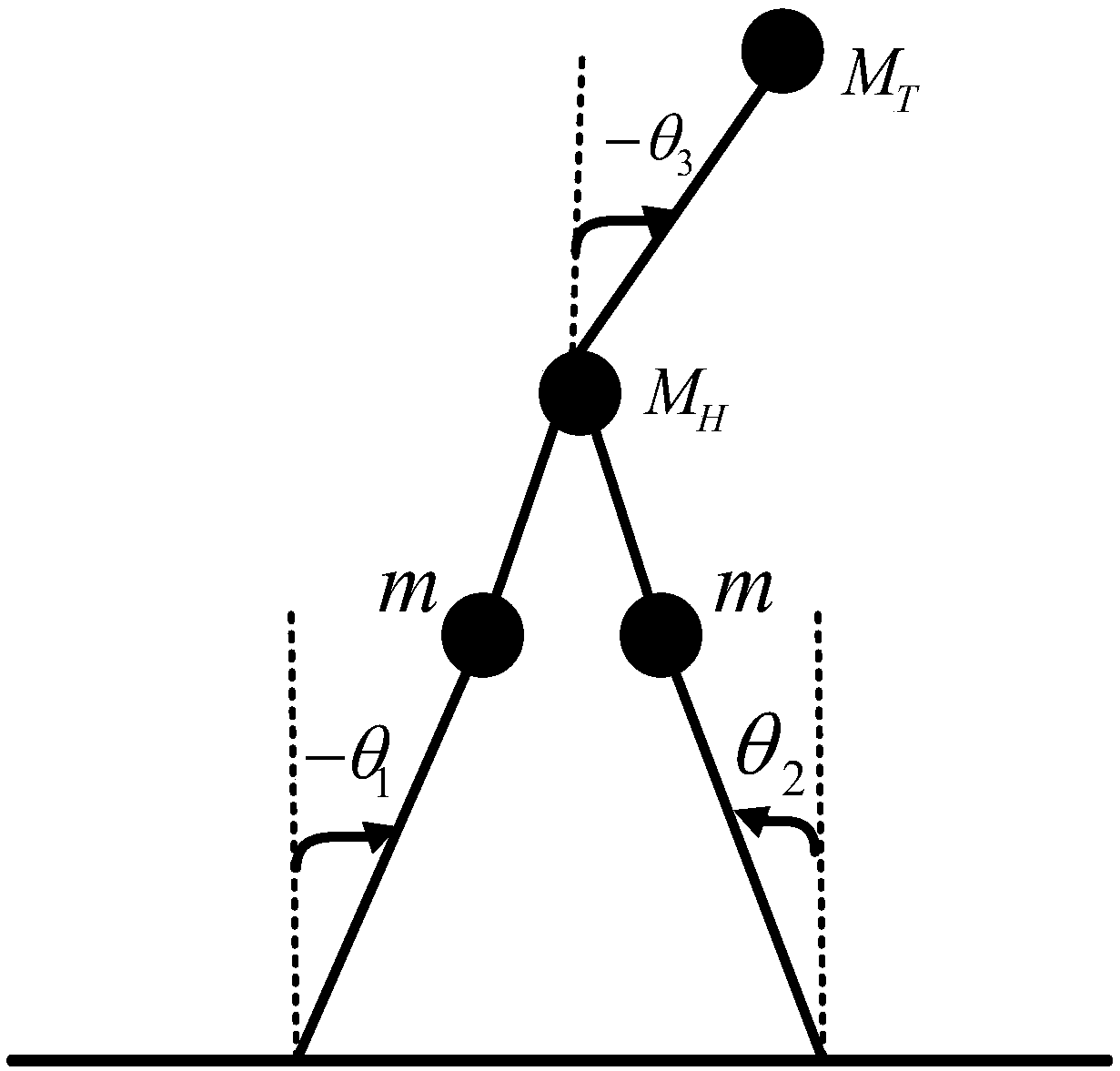
[0064] S1: Establish dynamic model of biped walking robot;
[0065] S2: Design a robust controller;
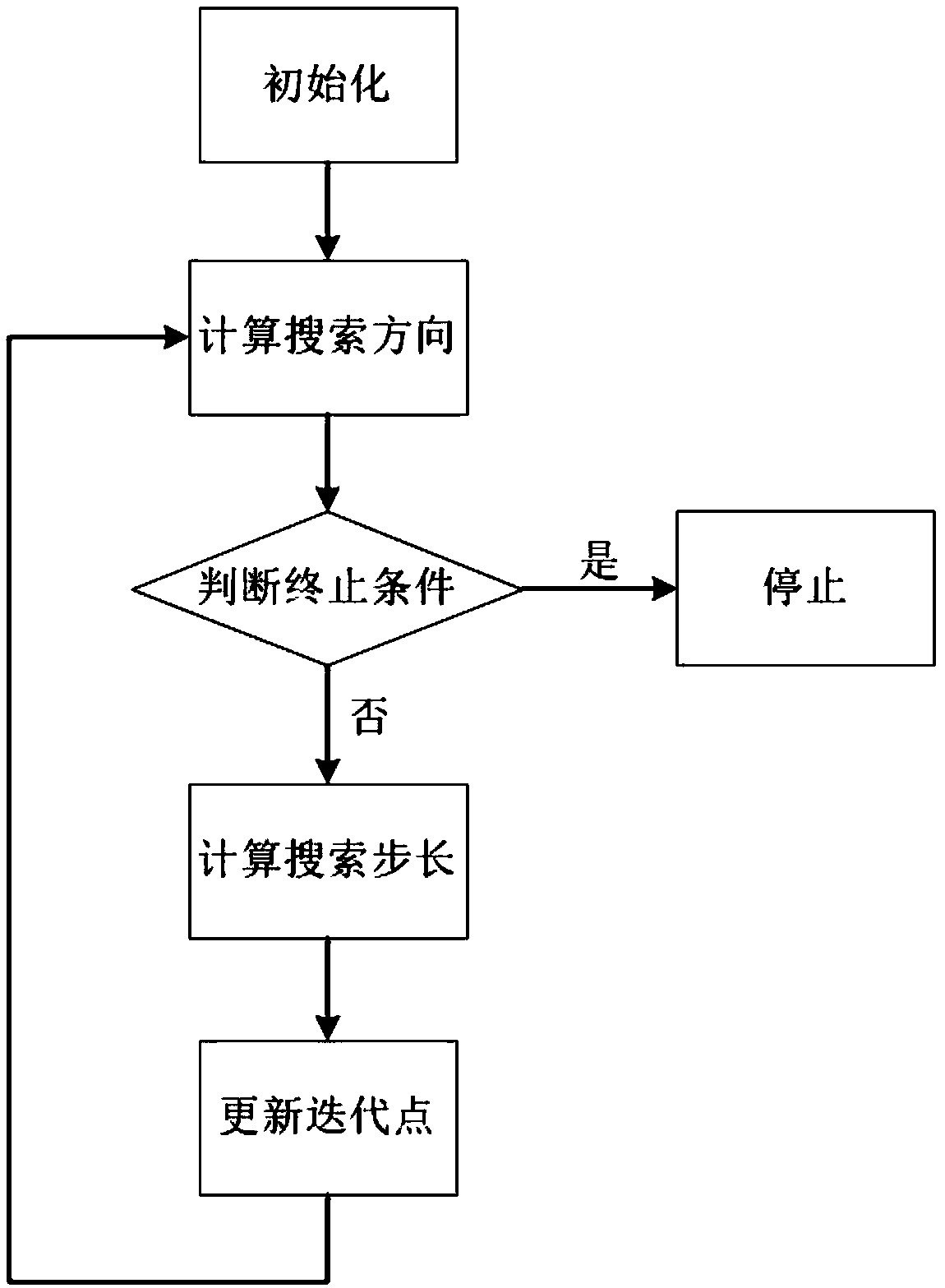
[0066] S3: Design the Dai-Yuan linear equality constraint optimization algorithm.
[0067] The dynamic model of the dynamic biped walking robot in the step S1 is as follows:
[0068]
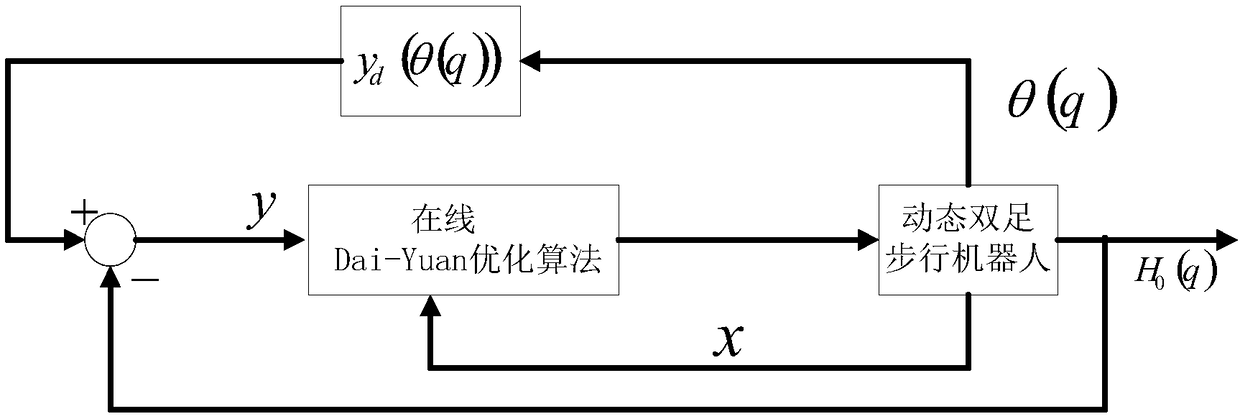
[0069] Among them, the vector field is a local Lipschit continuous function, is the state variable before the collision, is the state variable after collision, S is the collision switching surface when the swing leg is in contact with the ground, Δ is the collision algebraic mapping, q is the state variable of the robot, u∈R m It is the control signal input; define the output function as y(q)=H 0 (q)-y d (θ(q)); θ(q) is a strictly monotonic function about the variable q, y d (θ(q)) is the expected trajectory of the robot.
[0070] In the step S2, before the de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More