Lower limb rehabilitation walking aid device and working method thereof
A lower limb, variable stiffness technology, applied in the field of lower limb rehabilitation walking aids, can solve the problems that are not conducive to large-scale promotion, single working mode, and small change range, so as to avoid the knee joint from straightening too fast and the thigh from falling.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
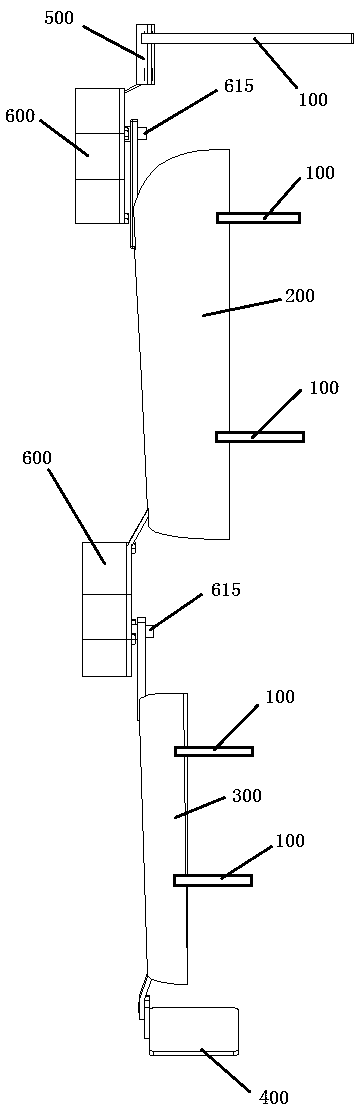
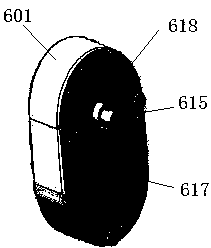
[0023] Such as Figure 1~6 As shown, a lower limb rehabilitation walking aid device includes two variable stiffness elastic joints 600 distributed up and down in the vertical direction, and the upper variable stiffness elastic joint 600 of the two variable stiffness elastic joints 600 is installed at the hip joint, Among the two variable stiffness elastic joints 600, the lower variable stiffness elastic joint 600 is installed at the knee joint. The variable stiffness elastic joint 600 includes a shell 601, and a main shaft spring sleeve 611 is arranged inside the shell 601. The main shaft spring sleeve 611 The right side is provided with an incomplete gear 613 with incompletely evenly distributed gear teeth on the outer periphery, a scroll spring A609 is arranged on the main shaft spring sleeve 611, and a driven shaft spring sleeve 612 is arranged below the main shaft spring sleeve 611. The right side of the shaft spring sleeve 612 is provided with a driven gear 614 with compl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More