

Finger wrist integrated software gripper
A soft gripper and one-piece technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of unstable grasping, inability to adjust the posture and opening angle of the gripper, and insufficient adaptability of the grasped objects, and achieve the goal of overcoming Unstable grasping, good adjustability and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
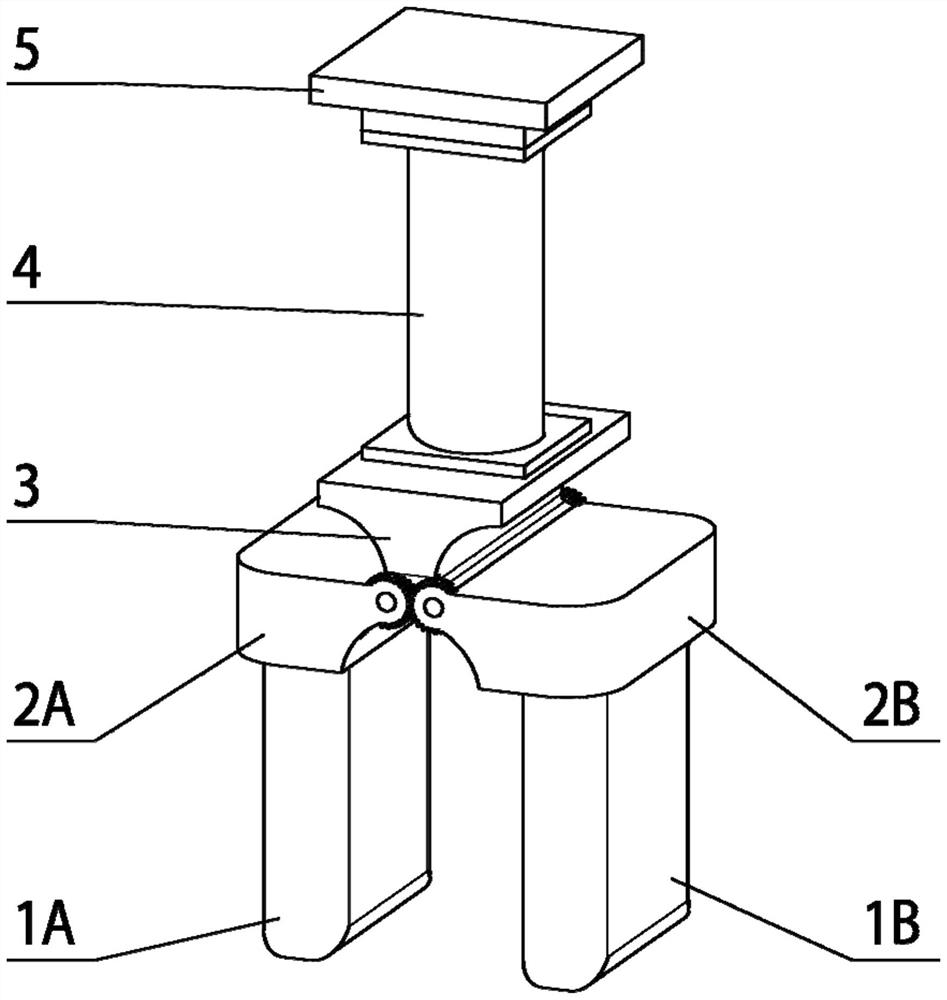
[0027] Such as figure 1 As shown, it is a preferred embodiment of a finger-wrist integrated soft gripper of the present invention. The soft gripper includes: left pneumatic soft finger 1A, right pneumatic soft finger 1B, adjustable left arm 2A, adjustable right arm Arm 2B, main arm 3, pneumatic software wrist 4, installation panel 5, left pneumatic software finger 1A has the same structure as right pneumatic software finger 1B, adjustable left arm 2A has the same structure as adjustable right arm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More