

An unmanned aerial vehicle target tracking method
A target tracking and UAV technology, applied in the field of UAV autonomous navigation, can solve the problems of uncontrollable flight trajectory, loss of control, UAV unable to obtain its own position, etc., to achieve the effect of autonomous tracking and expanding search range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solution of the present invention will be further described below in conjunction with the drawings and embodiments.
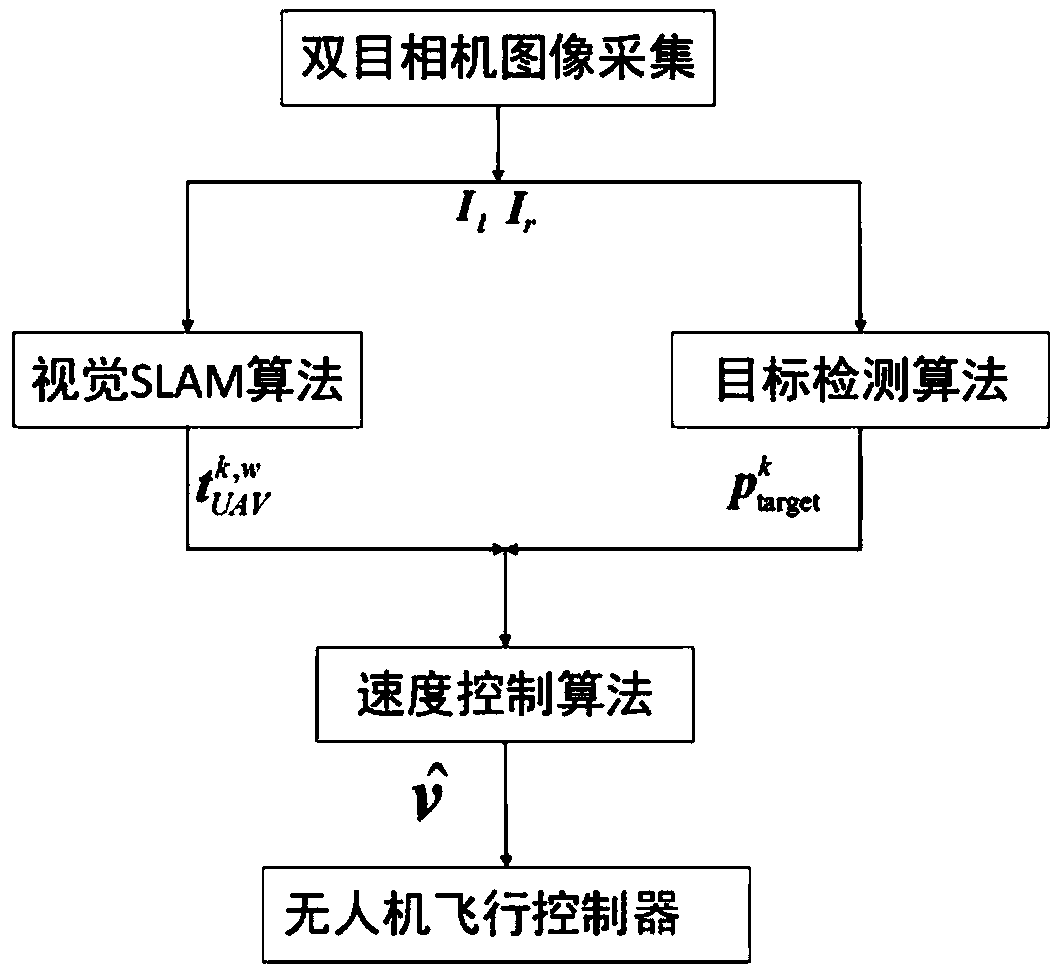
[0045] Such as figure 1 As shown, a UAV target tracking method, which locates the position of the UAV through visual SLAM while detecting the target, realizes the autonomous tracking of the UAV, including the following steps:
[0046] (1) The binocular camera image acquisition device obtains the left eye image I l And right eye image I r , As the input of visual SLAM algorithm and target detection algorithm.
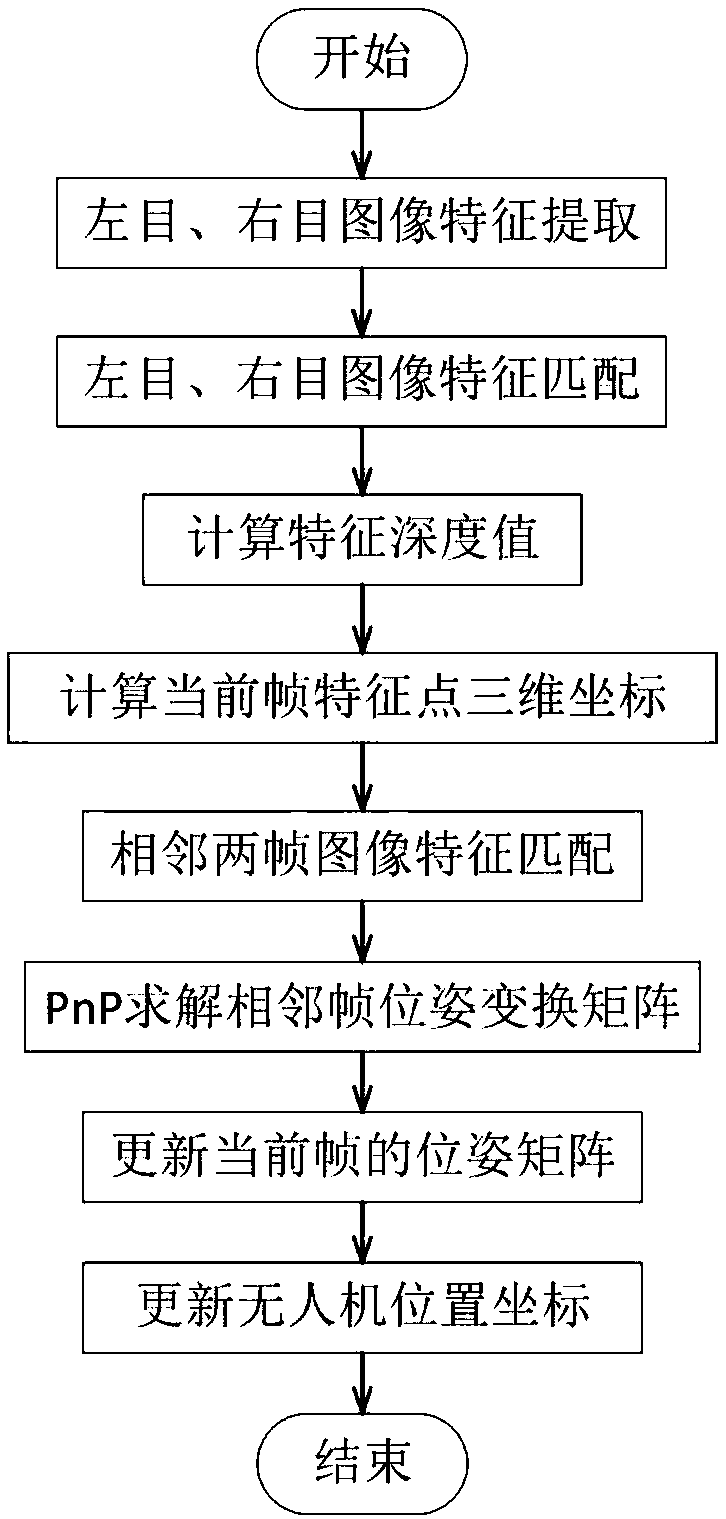
[0047] (2) The visual SLAM algorithm calculates and outputs the position coordinates of the drone in the world coordinate system
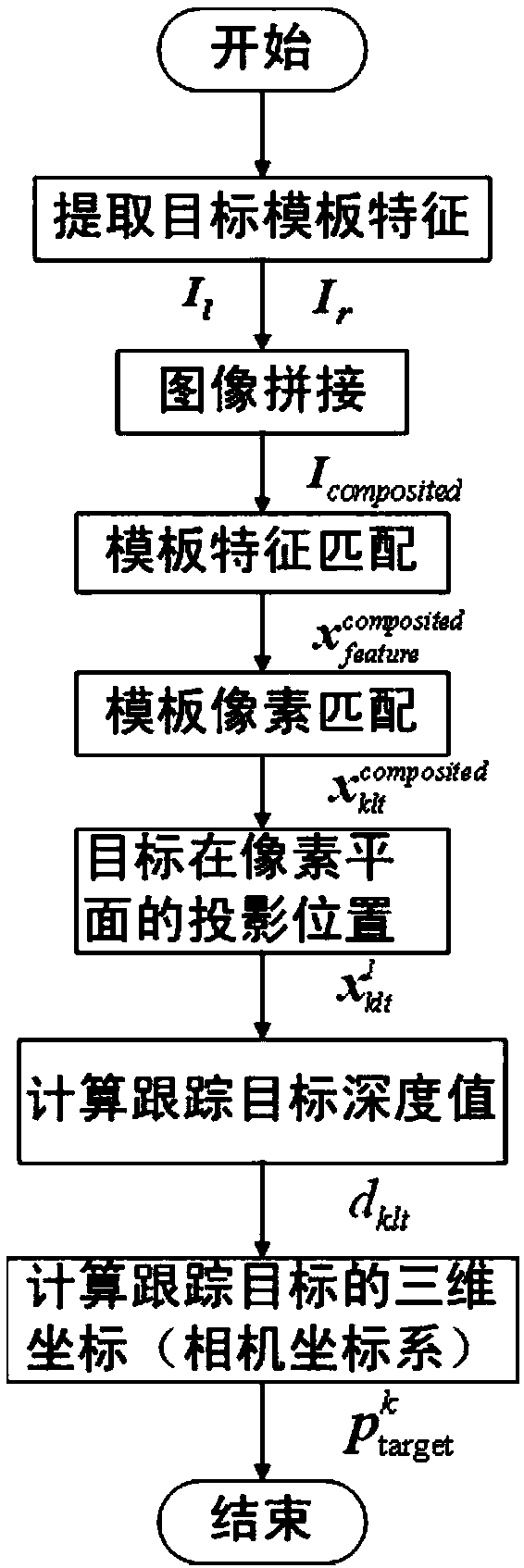
[0048] (3) Target detection, target detection is performed in the panorama image of the left eye and right eye images, and the three-dimensional coordinates of the tracking target in the camera coordinate system are calculated and output
[0049] (4) The real-time position of the drone in the world coordinate sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More