Injection molding machine workpiece dismounting mechanical grasping hand capable of realizing automatic replacement
A mechanical gripper and automatic replacement technology, which is applied in the field of mechanical grippers for injection molding machines, can solve the problems of cumbersome replacement process, grasping plastic parts, and affecting the processing efficiency of plastic parts, so as to reduce the overall weight, smart operation and grasping Take the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
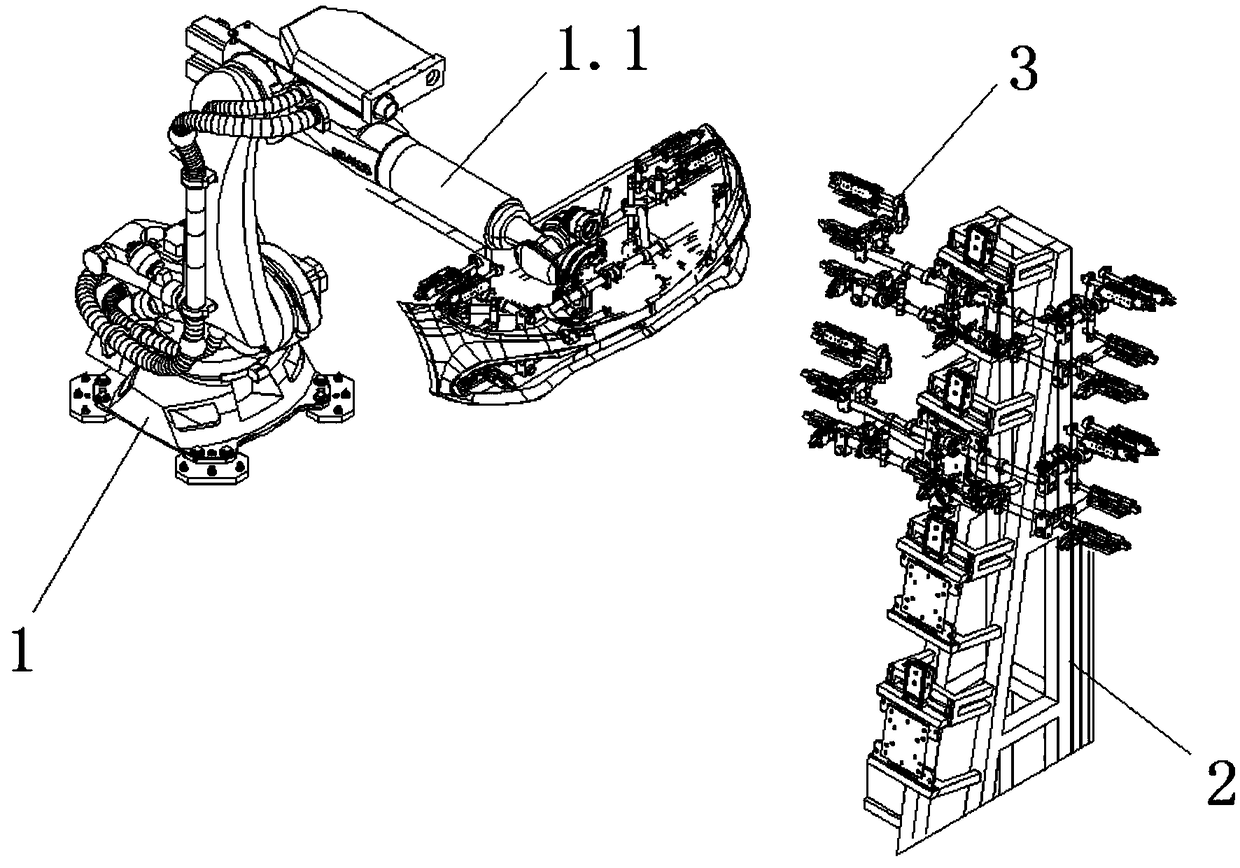
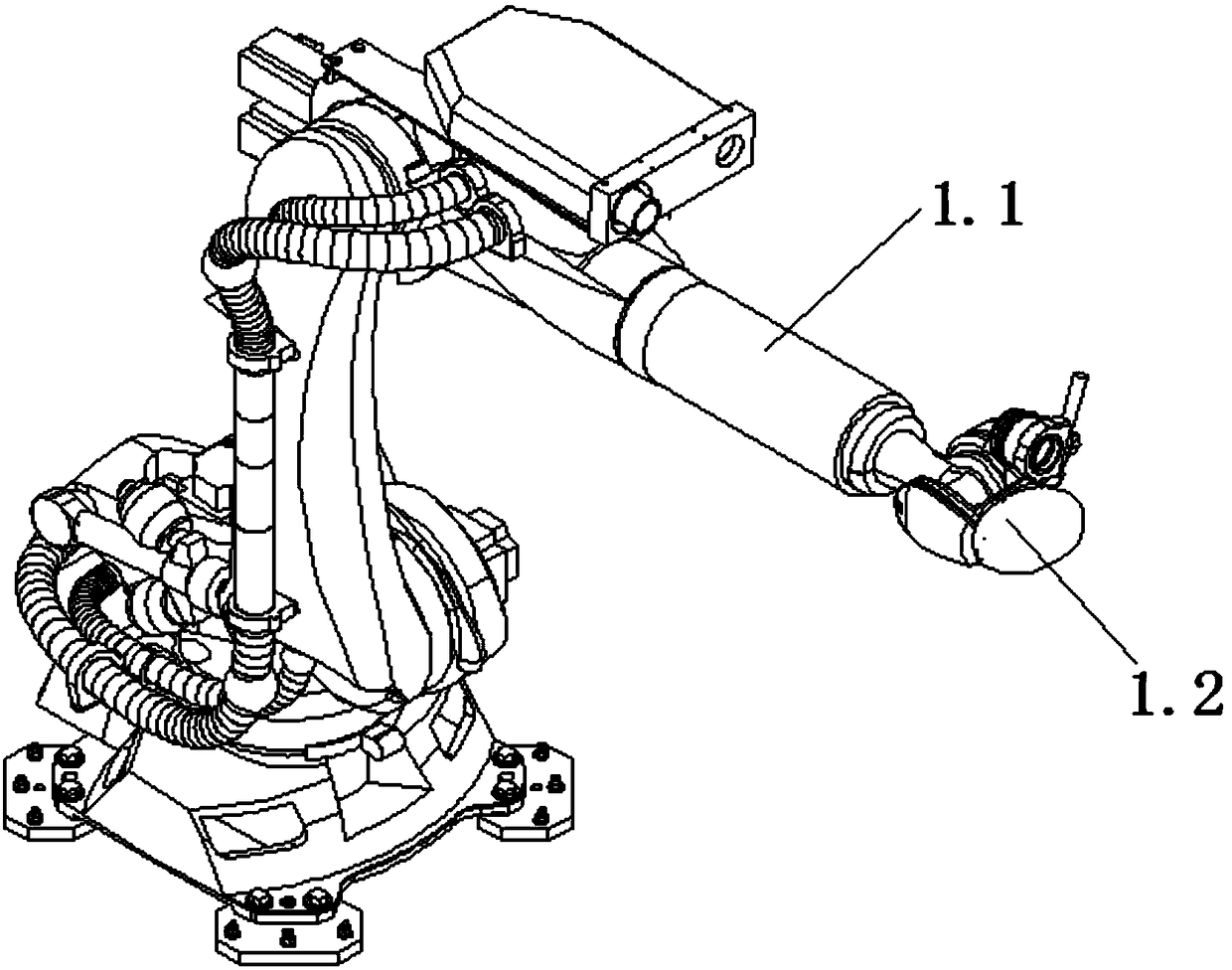
[0016] see Figure 1 to Figure 5 , the present invention relates to an automatically replaceable mechanical gripper for the lower part of an injection molding machine, which includes a robot 1, the bottom of which is fixed on a robot base, a mechanical arm 1.1 is arranged on the side of the robot 1, and the end of the mechanical arm 1.1 Equipped with a male gun changer 1.2.
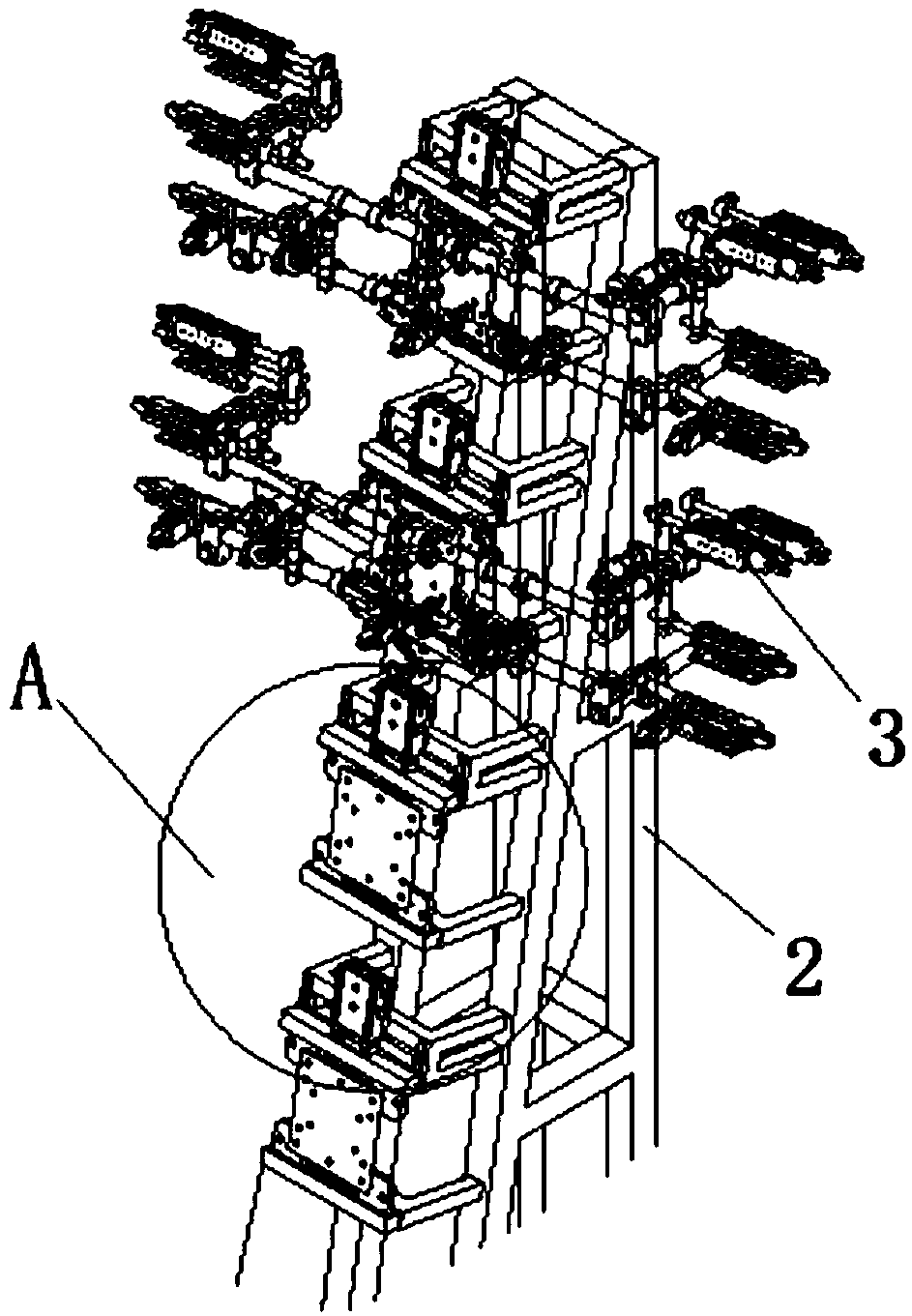
[0017] The right side of the rear end of the robot base is provided with a gripper bracket 2, the bottom of the gripper bracket 2 is fixed on the ground by expansion screws, and the front of the gripper bracket 2 is provided with multiple sets of cylinder clamps 2.1 from top to bottom, two adjacent up and down Cylinder fixtures 2.1 form a group, and the bottom of the upper cylinder and the top of the lower cylinder of each group of cylinder fixtures 2.1 are fixed to the guide rails 2.2 placed horizontally, and there is a mechanical gripper 3 that can be used for replacement between the two guide rails 2.2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More